[ad_1]
A menudo comenzamos el diseño de un amplificador operacional con un modelo idealizado. Si bien esto facilita el análisis, también significa que a nuestro modelo le faltan numerosos detalles potencialmente importantes sobre las limitaciones de potencia del amplificador operacional. Ya hemos cubierto una de estas limitaciones, la fluctuación de la señal, en una serie de artículos de dos partes.
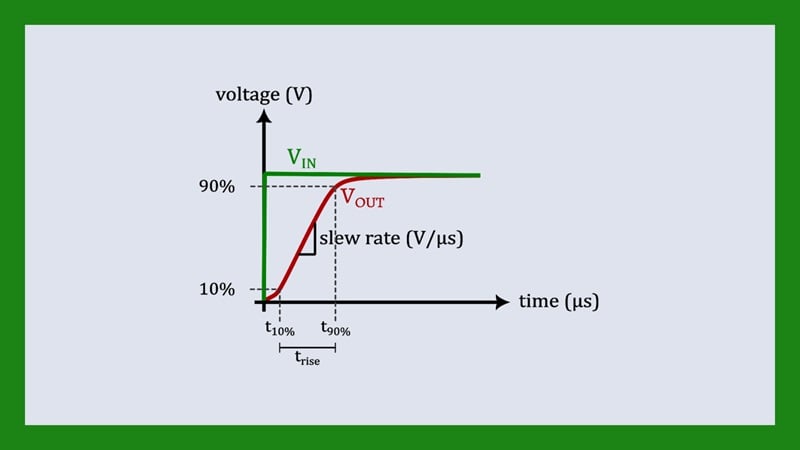
En este artículo analizamos otra no idealidad: Tasa de incrementoEsto se define como la tasa máxima de cambio de voltaje que puede producir el circuito de salida de un amplificador operacional. Cuando la pendiente de una forma de onda de salida teórica excede la velocidad de respuesta, la forma de onda de salida real se desvía de la forma de onda de entrada, como muestra la Figura 1.

Ilustración 1. La limitación de la velocidad de respuesta de la salida de un amplificador operacional, con el tiempo de subida dado por taumentar. Imagen cortesía de Robert Keim
La velocidad de respuesta generalmente se expresa en voltios por microsegundo (V/μs). Si multiplicamos la velocidad de respuesta por un período de tiempo, el resultado nos dice cuánto aumenta el voltaje de salida durante ese período. Sin embargo, normalmente utilizamos la velocidad de respuesta especificada de un amplificador operacional para la estimación. Hora de levantarse– o, en la dirección opuesta, Otoño.
Podemos definir el tiempo de subida –taumentar en la figura anterior, como el tiempo que tarda una señal en aumentar del 10% al 90% de su nuevo valor. La tasa de aumento de las señales descendentes es similar, la única diferencia es que ahora medimos el cambio del 90% al 10%. Tenga en cuenta que el resto de este artículo solo analiza las limitaciones de la velocidad de respuesta para señales de salida ascendentes.
Para estimar el tiempo de aumento, dividimos el 80% del cambio esperado en la producción por la tasa de aumento. Este método de medir el tiempo de subida reduce el efecto de los cambios graduales que se producen al principio o al final del flanco ascendente. Podemos entender esto mejor viendo un ejemplo.
Tiempo de subida: un ejemplo
Digamos que necesitamos un amplificador operacional para amplificar la señal entrante de un sensor que pasa rápidamente de 0 V a 500 mV cuando ocurre un determinado evento físico. Suponemos lo siguiente:
- Configuramos un amplificador operacional como un amplificador no inversor con una ganancia de 10, por lo que la salida esperada es una transición rápida de 0 V a 5 V.
- Usamos el amplificador operacional clásico 741, que tiene una velocidad de respuesta de aproximadamente 0,5 V/μs.
En este caso, el estado del 10 % al 90 % corresponde a un aumento de 0,5 V a 4,5 V, lo que da un aumento de voltaje de 4 V. El tiempo de subida se calcula de la siguiente manera:
$$t_{rise}~=~\frac{4\ \text{V}}{0.5\ \frac{\text{V}}{\mu \text{s}}}~=~8\ \ mu \ Texto{s}$$
A continuación, utilizamos el esquema LTspice de la Figura 2 para confirmar el tiempo de subida mediante simulación.

Figura 2. Un circuito LTspice para probar la velocidad de respuesta del amplificador operacional 741 Imagen cortesía de Robert Keim.
La Figura 3 muestra los resultados de la simulación. Como puede ver, la señal de salida del amplificador operacional no aumenta tanto como la señal de entrada.

Figura 3. Entrada de función de paso simulada y salida limitada de velocidad de giro. Imagen cortesía de Robert Keim
Podemos medir el tiempo de subida y la velocidad de descenso haciendo zoom y usando la función de cursor (Figura 4).

Figura 4. Usando la función de cursor de LTspice, podemos medir la pendiente de la rampa de salida. Imagen cortesía de Robert Keim
La señal de salida de vFUERA DE = 0,5 V a vFUERA DE = 4,5 V parece bastante lineal. El tiempo de subida es de ~8,5 μs, que se acerca a nuestro valor teórico. Se informa que la pendiente durante esta parte de la forma de onda es 470.851 V/s, que es aproximadamente 0,47 V/μs. Esto indica que el modelo SPICE utilizado en la simulación reproduce con éxito la velocidad de respuesta esperada del 741 de aproximadamente 0,5 V/μs.
El efecto de la velocidad de respuesta en señales sinusoidales.
Ahora hemos visto cómo la velocidad de respuesta de un amplificador operacional puede aumentar el tiempo de subida de la forma de onda de salida, convirtiendo una transición rápida de la etapa de entrada en una transición de salida de rampa lineal. Sin embargo, las limitaciones de la velocidad de giro afectan más que solo las funciones de paso. Afectan cualquier señal de salida que deba cambiar más rápido de lo que el amplificador operacional puede soportar; por ejemplo, señales sinusoidales de alta frecuencia.
Cuando pensamos en una señal sinusoidal, pensamos principalmente en distorsiones causadas por la no linealidad. Si la señal de salida real no puede aumentar tan rápidamente como las partes de pendiente más alta de la señal de salida esperada, el amplificador operacional no puede mantener una relación lineal entre la entrada y la salida.
La Figura 5 muestra un ejemplo extremo de distorsión de la velocidad de respuesta. Los flancos ascendentes y descendentes de la producción están limitados por la velocidad de respuesta. Esto significa que la señal ahora es una onda triangular en lugar de una onda sinusoidal.

Figura 5. El amplificador operacional 741 simulado experimenta una limitación de la velocidad de giro durante las porciones de pendiente más alta de la sinusoide. Imagen cortesía de Robert Keim
¿Qué causa la limitación de la velocidad de respuesta?
Los retrasos y limitaciones de ancho de banda en los circuitos están causados fundamentalmente por la capacidad. Las corrientes fluyen en circuitos y producen voltajes a medida que pasan a través de impedancias. Sin embargo, las tensiones no aparecen inmediatamente: las corrientes primero deben cargar o descargar capacidades parásitas e intencionadas. Las capacidades mayores requieren más corriente de carga y provocan retrasos más prolongados.
Los amplificadores operacionales tienen capacitancias internas que deben cargarse y descargarse, y éstas limitan la velocidad a la que puede cambiar el voltaje de salida. En muchos casos, estas capacidades internas incluyen un condensador de compensación relativamente grande.
Por ejemplo, la Figura 6 muestra un diagrama de circuito interno del amplificador operacional LM124 de Texas Instruments. Su condensador de compensación (CC) reduce la velocidad a la que el voltaje puede cambiar en la segunda etapa del amplificador.

Figura 6. Diagrama de circuito interno para el amplificador operacional LM124. Su condensador de compensación está marcado con CC. Imagen cortesía de Texas Instruments
Un condensador de compensación interno hace que un amplificador operacional sea más estable pero reduce la velocidad de respuesta. En lugar de un condensador de compensación, los amplificadores operacionales no compensados están limitados por capacidades parásitas más pequeñas. Por lo tanto, ofrecen una tasa de respuesta más alta.
Elegir un amplificador operacional según la velocidad de respuesta
Los amplificadores operacionales modernos han superado con creces las capacidades de velocidad de respuesta del 741, y los diseñadores ahora tienen muchas opciones de amplificadores operacionales para elegir. Por ejemplo, el LT1817 tiene una velocidad de respuesta de 1500 V/μs. Si eso no es suficiente, puede considerar un amplificador de retroalimentación de corriente (CFA) como el AD8009, que llega hasta 5500 V/μs.
La arquitectura CFA es fundamentalmente diferente de la arquitectura VFA (amplificador de retroalimentación de voltaje) utilizada en la mayoría de los amplificadores operacionales. Si su aplicación requiere una velocidad de respuesta alta para evitar tiempos de subida excesivos, un CFA puede ser una mejor opción. Para aquellos que quieran profundizar más en este tema, la serie de artículos del Dr. Sergio Franco sobre CFA es una buena fuente. También recomiendo su artículo “Cómo aumentar la velocidad de respuesta en amplificadores operacionales” si desea obtener más información sobre los detalles eléctricos y matemáticos de la velocidad de respuesta de los amplificadores operacionales.
[ad_2]

New Comments