
[ad_1]

El mini robot seguidor de luz que se propone aquí funciona con luz ambiental. Utiliza sensores para detectar fluctuaciones en la intensidad de la luz, lo que le permite navegar y realizar tareas en diferentes entornos.
Esta exploración de minirobot combina robótica y tecnología de detección de luz, lo que demuestra el potencial de los sistemas autónomos para adaptarse a las condiciones cambiantes de iluminación. El diagrama de bloques del robot seguidor de luz se muestra en la Fig. 1.
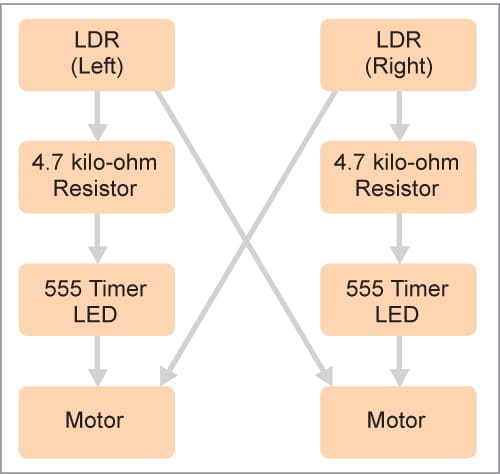
Este mini robot introduce una exploración inmersiva del mundo de la robótica combinando la resistencia dependiente de la luz (LDR) y el temporizador 555 IC. El concepto central es crear un robot activado por luz donde el LDR actúa como los «ojos» sensoriales y el temporizador 555 actúa como el «cerebro» controlador.
A medida que cambia la intensidad de la luz, los valores de resistencia del LDR detectan estas fluctuaciones y hacen que los 555 temporizadores orquesten los movimientos del robot. El resultado es un robot que responde dinámicamente a su entorno y se mueve en coordinación con la presencia o ausencia de luz.
Este esfuerzo práctico proporciona una comprensión fundamental de los sensores, temporizadores y control de motores, cerrando la brecha entre la teoría y la aplicación práctica.
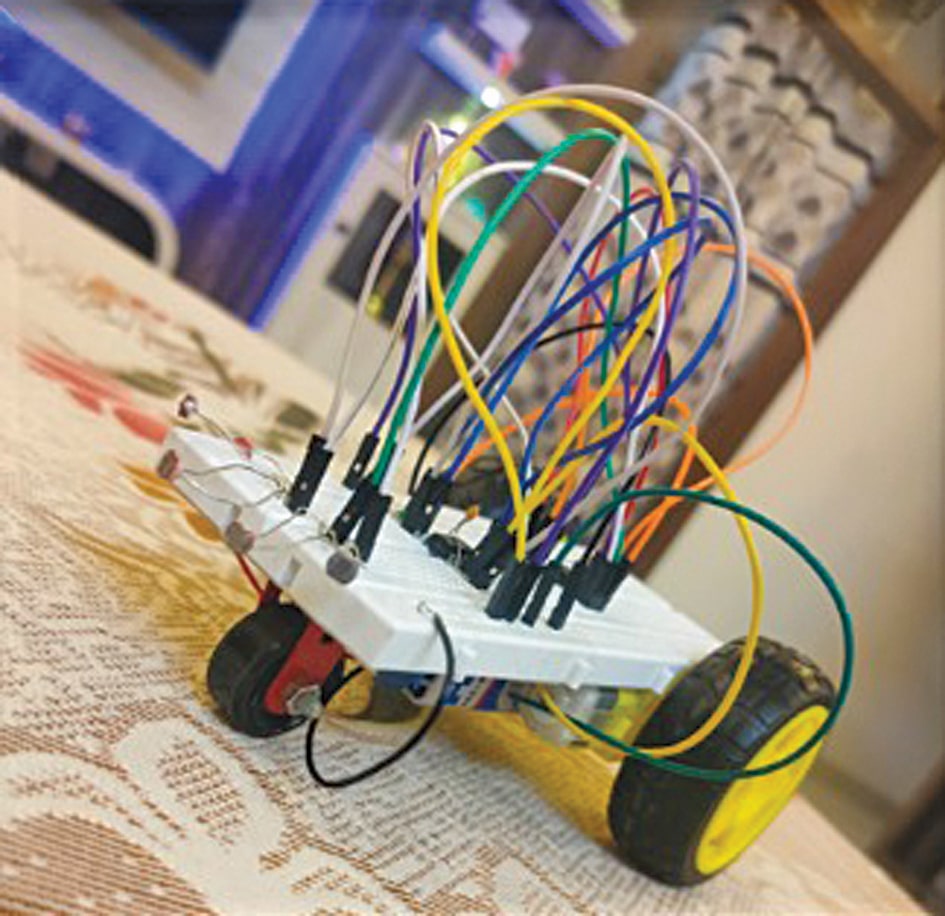
El prototipo del robot seguidor de luz en una placa se muestra en la Fig. 2.
Circuito y funcionalidad del robot Light Follower
La figura 2 muestra el diagrama de circuito del robot seguidor de luces. Consta de dos temporizadores 555 (IC1, IC2), dos motores de CC (M1, M2), dos resistencias dependientes de la luz (LDR1, LDR2) y algunos otros componentes. Se puede utilizar una fuente de alimentación de 9 V o una batería de 9 V como fuente de alimentación.
| Lista de artículos | |
| Semiconductor: | |
| IC1, IC2 | -555 temporizador |
| Resistencias (todas de 1/4 vatio, ±5 % de carbono): | |
| R1-R4 | -4,7 kiloohmios |
| Condensadores: | |
| C1, C2 | -0,01 µF poliéster |
| Varios: | |
| LDR1, LDR2 | -Resistencia dependiente de la luz |
| M1, M2 | -Motor de 12 V CC |
| -Montaje de robots | |
| -Dos ruedas | |
| -Una pequeña rueda móvil | |
| -Cable de puente, macho a macho | |
| -tablero de circuitos | |
| -Batería/adaptador de 9 V CC | |
La idea detrás del robot activado por luz es crear un sistema robótico versátil y adaptable que pueda responder a los cambios en las condiciones de iluminación. Los sensores de luz permiten al robot percibir su entorno y tomar decisiones adecuadas.
El circuito consta de dos partes: una es LDR, el elemento fotosensible, y la otra es el activador 555. El LDR1 está emparejado con la resistencia R1 para formar un divisor de potencial que suministra el voltaje de disparo al IC 555 (IC1). Proporciona voltaje máximo cuando no incide luz sobre él y voltaje mínimo cuando incide luz sobre el LDR.

La resistencia del LDR es inversamente proporcional a la intensidad de la luz que incide sobre él. Esto significa que la resistencia del LDR es menor y viceversa cuando la intensidad de la luz incidente es alta.
El activador está construido alrededor de un IC 555 cableado como un multivibrador astable. Este principio se utiliza aquí para hacer que el 555 actúe como un interruptor cuando la luz incide en el LDR.
El funcionamiento de este robot es sencillo. El temporizador IC 555 se activa cuando su pin de descarga 7 recibe un voltaje de más de 0,8 V. Una vez que se activa el IC, el voltaje en los pines 2 y 6 debe estar entre 1/3 y 2/3 del voltaje de suministro para que la salida sea alta.
Por ejemplo, si el voltaje en el pin de descarga 7 es superior a 0,8 V y el voltaje en los pines 2 y 6 es la mitad del voltaje de suministro, la salida aumentará para hacer girar el motor.
En el circuito, se crea un divisor de voltaje a partir del LDR y una resistencia. Luego se conecta al IC del temporizador 555. Cuando está oscuro, la resistencia del LDR aumenta y el voltaje en el divisor de voltaje cae por debajo de 0,8 V, lo que hace que la salida IC del temporizador 555 baje y apague el motor.
Cuando hay suficiente luz, el voltaje en el pin de descarga 7 aumenta por encima de 0,8 V y la salida del 555 IC aumenta para encender el motor.
Construcción y pruebas
Antes de ensamblar el circuito usando el diagrama de circuito que se muestra en la Fig. 3, consulte también la Fig. 2. Esto le dará una idea precisa de la estructura del robot. Monte el circuito directamente en la placa y use un gabinete y ruedas para que el robot pueda moverse suavemente cuando la luz incida en los LDR. Los LDR están montados en la parte superior de la placa de pruebas de tal manera que la luz debe incidir sobre ellos para que el robot se mueva correctamente.
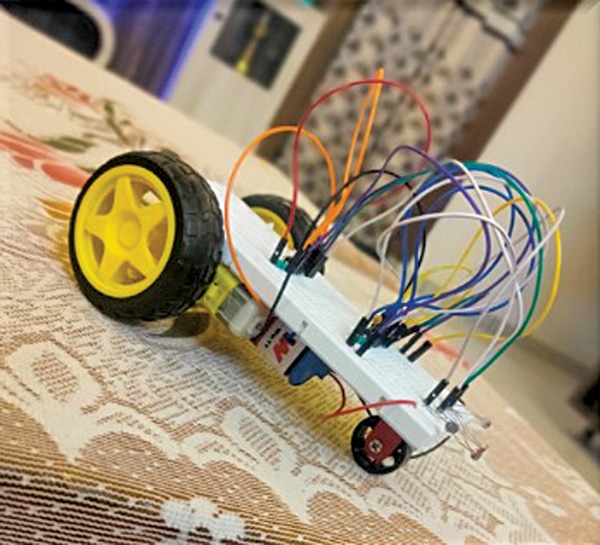
Después del ensamblaje adecuado, su robot activado por luz está listo para usar. Cuando la luz incide sobre LDR1 o LDR2, los motores respectivos giran en consecuencia, lo que provoca el movimiento del robot. En la Fig. 4 se muestra una imagen de un robot listo para usar en una placa de pruebas.
Autores: Manmohan Singh, Vivek Gowda, Ramiksha Shetty y Sahana P del Departamento de Electrónica y Comunicaciones de la Facultad de Ingeniería Sapthagiri de Bengaluru
[ad_2]