
[ad_1]

En el ajetreado mundo actual, el número de vehículos aumenta día a día y con él el número de accidentes por descuido. De esta manera, controlar el encendido/apagado de la pantalla juega un papel importante para evitar este tipo de errores. Al crear un controlador automatizado de señales de giro para vehículos con Arduino, se pueden reducir significativamente los accidentes y salvar muchas vidas. El objetivo de este proyecto es cambiar las luces intermitentes derecha/izquierda de forma independiente y aliviar al conductor de este estrés.
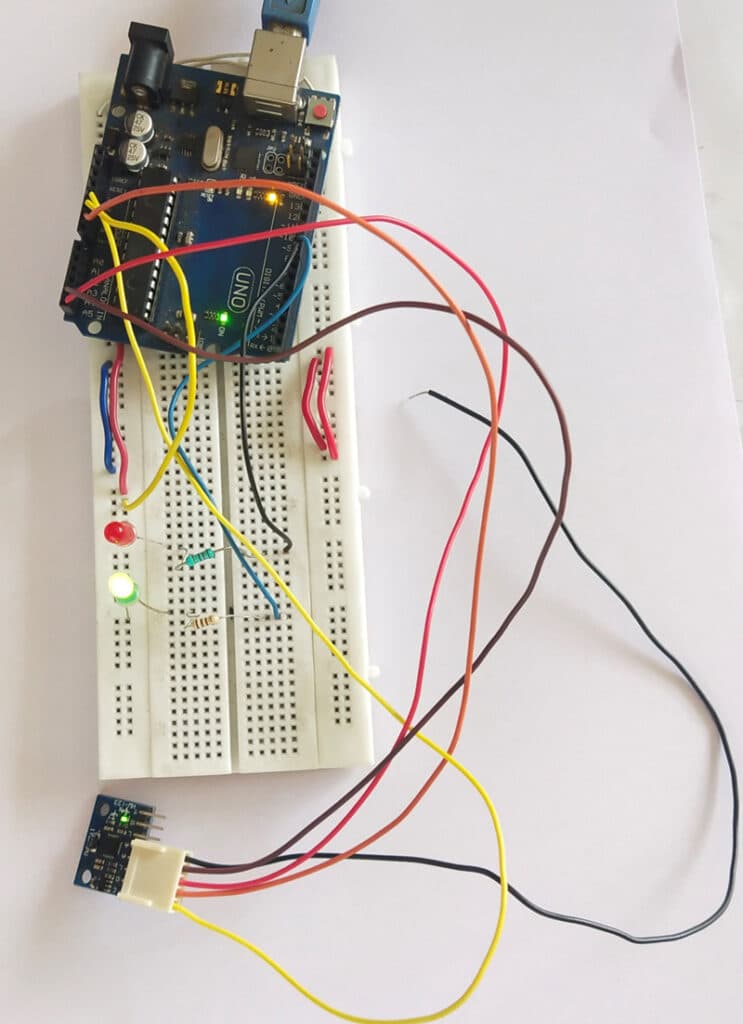
Utilizando un girómetro de seis ejes con acelerómetro, es posible determinar la dirección del movimiento del volante de un vehículo de cuatro ruedas o del manillar de un vehículo de dos ruedas. Con un cierto movimiento desde su origen hacia la derecha se conmuta el intermitente derecho y hacia la izquierda se conmuta el intermitente izquierdo. Se explica en detalle la implementación de hardware y software, incluida la configuración del sensor MPU6050 y Arduino, así como la programación del sistema utilizando el IDE de Arduino. La figura 1 muestra el prototipo del autor. Los componentes utilizados en el sistema se enumeran en la tabla BOM.
Lista de partes:
| Componentes | Descripción |
| tablero de circuitos | Microcontrolador para programación. |
| MPU6050(MOD2) | Sensor de aceleración y giroscopio de 6 ejes |
| Micro USB | Para programar |
| tabla de pan | Para prototipos de circuitos |
| Resistencias – 330R | Para alimentar el LED |
| CONDUJO | Para mostrar derecha/izquierda en la creación de prototipos |
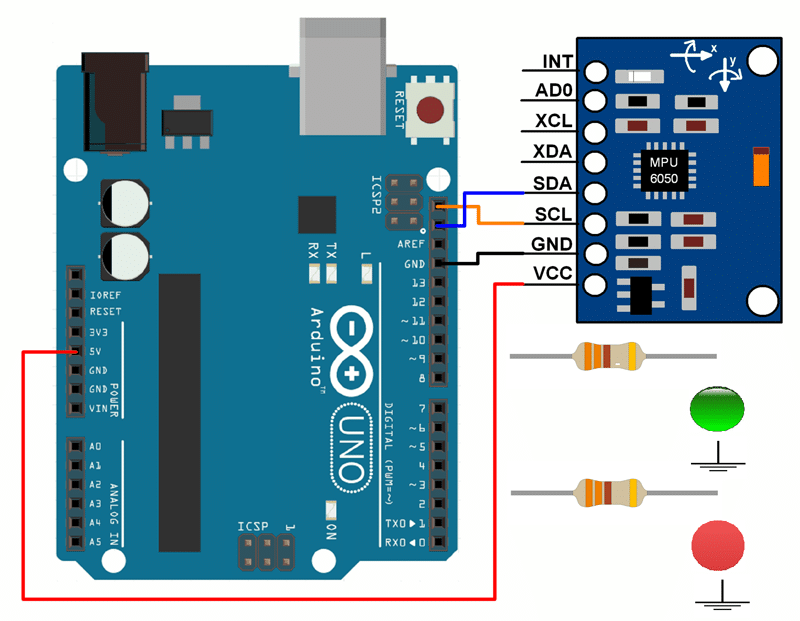
Diagrama de circuito y funcionalidad:
El diagrama de circuito del control automático de la señal de giro derecha/izquierda del vehículo usando MPU6050 y Arduino Uno se muestra en la Fig. 2. Consta de Arduino Uno (MOD1), MPU6050 (MOD2), resistencias 330R, LED y algunos conectores.
Codificación de software:
Para la codificación, se utiliza la biblioteca Wire (wire.h) para conectarse y comunicarse con el MPU6050 a través de la comunicación I2C. La explicación paso a paso de la codificación se puede encontrar en el fragmento de código de la Fig. 3.
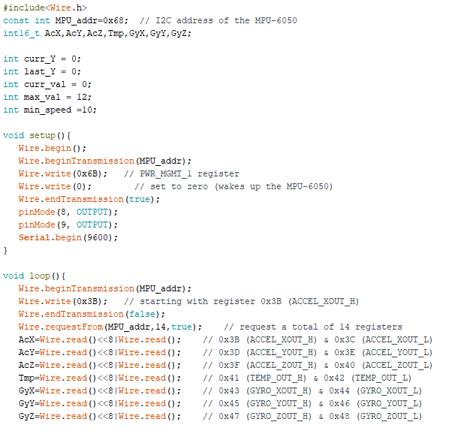
En la función de configuración, se inicializa la comunicación serial, el sensor MPU6050 y los pines utilizados para el LED se configuran como pines de salida.
En la función de bucle
- Las lecturas del acelerómetro y girómetro se leen en tres ejes.
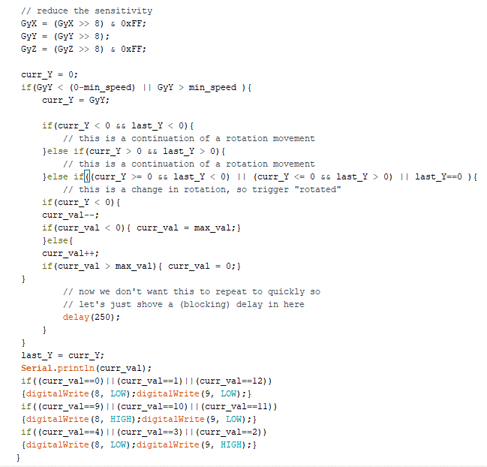
- Como se trata de rotación, tomamos GyY y lo procesamos más.
- La velocidad mínima es la velocidad mínima a la que se debe tener en cuenta la rotación y el valor máximo es una división de 360 grados. Aquí utilicé 10 como velocidad mínima y 12 como valor máximo para mi creación de prototipos.
- Si el valor leído cae por debajo de la velocidad especificada, el valor se cambia a curr_y. Curr_y se almacena en last_y antes de salir del ciclo.
- El curr_val se determina usando curr_y.
- Con curr_val se determina si el volante de un vehículo de cuatro ruedas o el manillar de un vehículo de dos ruedas se mueve hacia la derecha o hacia la izquierda y se enciende el LED correspondiente.
Construcción y pruebas:
Conecte el sensor de acuerdo con el diagrama de circuito en la Fig. 2, cargue el código en la placa y encienda el dispositivo con un cable USB o una batería de 5 V. Ahora haga un cambio en la posición de la rueda prototipo. El LED correspondiente se ilumina.
V. Shelvaraj es director técnico de TRY WIN TECH
[ad_2]