
[ad_1]


Este robot Namaste, cuya estructura mecánica puede estar hecha de materiales reciclados, monitorea a las personas dentro de su alcance de 100 cm mediante un módulo de ultrasonido.
Cuando reconoce a alguien dentro de este rango, lo saluda con “Namasté”, simbolizado por la unión de ambas manos en el saludo tradicional indio.
El robot es versátil y se puede utilizar en diversos entornos, como ubicaciones comerciales, parques, tiendas, etc., para enviar saludos. A pesar de su función principal, el robot está diseñado para fomentar modificaciones con fines adicionales.

Por ejemplo, imaginemos la posibilidad de adaptar la tecnología para su uso cerca de puertas automáticas en aeropuertos o talleres.
Los usuarios tienen la flexibilidad de reemplazar el servo con diferentes actuadores para funciones como la apertura automática de portones o puertas. Alternativamente, se puede conectar un servo más grande para operar portones o puertas para que se abran automáticamente. El dispositivo es adaptable y puede reutilizarse para diferentes aplicaciones.
Sin embargo, nuestro enfoque sigue siendo demostrar la percepción de la presencia humana, activar el servomotor para mover las manos del robot y saludar a las personas cuando alguien se acerca.
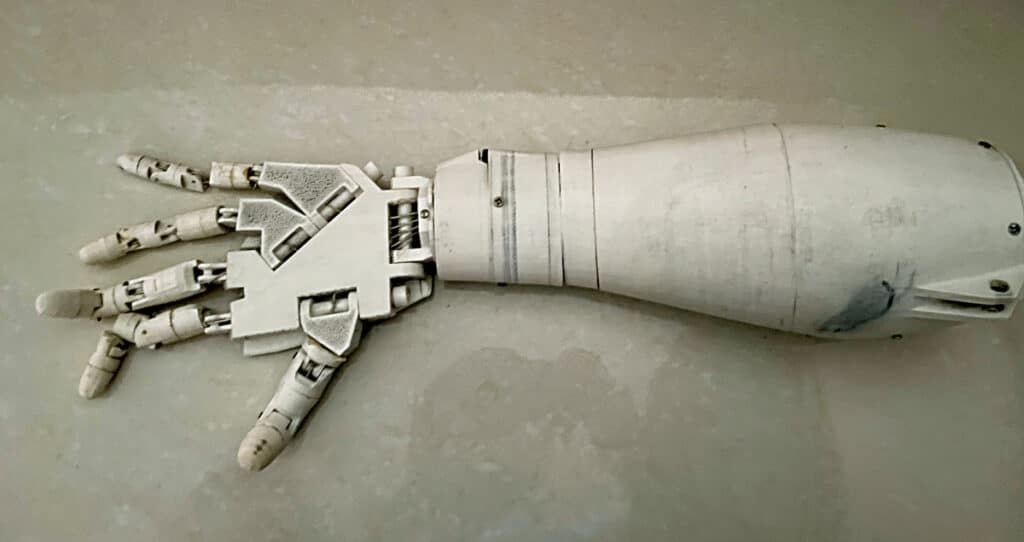
Para la mano mecánica del robot, los usuarios pueden comprar o imprimir en 3D una mano de robot como la mano de robot inMoov, o diseñar una estructura y un cuerpo de robot personalizados. La Figura 1 muestra el prototipo del autor en mano de Moov.
| lista de partes | |
| Componentes | Multitud |
| Arduino Uno/Mega/Nano (MOD1) | 1 |
| Servomotor SG90 (S1, S2) | 2 |
| Sensor ultrasónico HC-SR04 (MOD2) | 1 |
| Cuerpo mecánico para robots. | Opcional |
| Cable puente (macho-macho) | 12 |
| tablero de circuitos | 1 |
Circuito y funcionamiento del robot Namaste
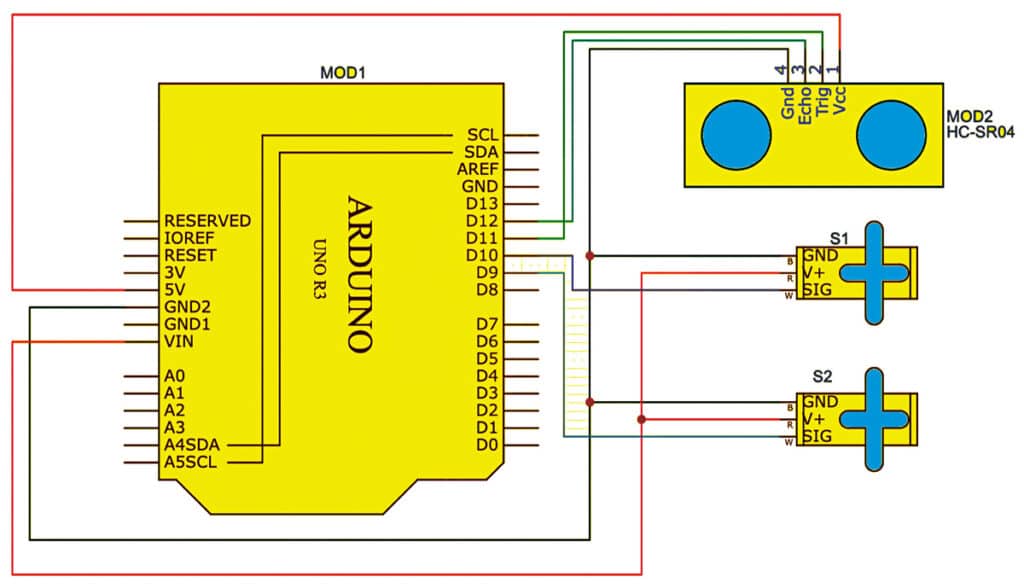
La Fig. 2 muestra el diagrama del circuito del dispositivo basado en tecnología Arduino Uno. Consiste en Arduino Uno (MOD1), un sensor ultrasónico HC-SR04 (MOD2), dos servomotores SG90 (S1, S2), una carcasa mecánica hecha de materiales reciclados, una placa de pruebas y cables de puente.
Los usuarios tienen la opción de reemplazar Arduino Uno con otras placas como Arduino Mega o Arduino Nano. A continuación se muestra una breve introducción a los componentes utilizados en el robot.
Servomotor SG90: Un servomotor es un tipo especial de motor que gira con gran exactitud y alta precisión. En un servomotor, un circuito de control proporciona retroalimentación continua sobre la posición actual del eje del motor, lo que permite una rotación precisa. Los servomotores generalmente se clasifican en kg/cm (kilogramos por centímetro), los servomotores aficionados se clasifican en 3 kg/cm, 6 kg/cm o 12 kg/cm. Este valor indica el peso que el servomotor puede levantar en una determinada distancia.
placa arduino: La placa del microcontrolador Arduino se basa en un microcontrolador ATmega. Tiene pines de entrada/salida digitales, entradas analógicas, un puerto USB, un conector de alimentación, un encabezado ICSP y un botón de reinicio.
Sensor ultrasónico HC-SR04: El HC-SR04 es un sensor de distancia con un alcance de 2 cm a 400 cm. El sensor contiene dos transductores ultrasónicos, uno de los cuales es un transmisor que envía pulsos ultrasónicos y el otro un receptor que escucha las ondas reflejadas, actuando esencialmente como un sonar.
código
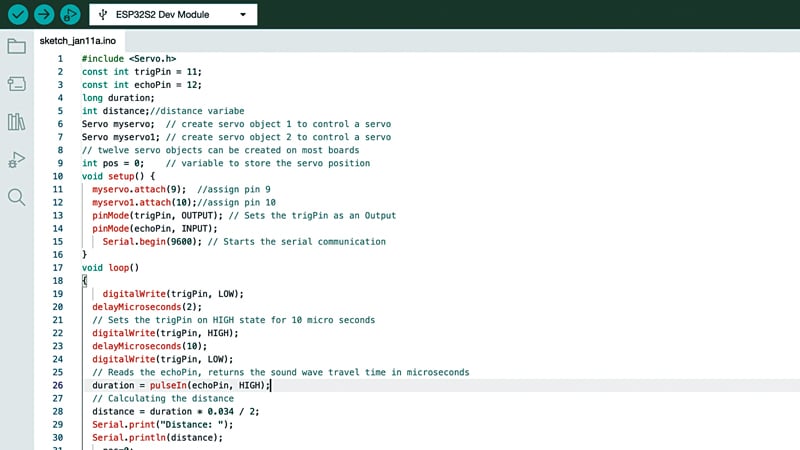
El código se crea utilizando el IDE de Arduino. Primero, se usa la biblioteca servo.h para controlar el servo, luego se definen los pines para el sensor ultrasónico. Aunque se puede utilizar cualquier pin libre, aquí los pines D11 y D12 del Arduino Uno se utilizan como pines de activación (2) y pines de eco (3) del sensor ultrasónico.
El pin Trig envía ondas ultrasónicas y el pin Echo recibe las ondas. La diferencia horaria entre envío y recepción se convierte en distancia. En consecuencia, el robot puede detectar que alguien se acerca y en respuesta el servomotor se mueve a modo de saludo o cualquier actuador puede sustituir al servo para la apertura automática de puertas, ventanas o puertas de garaje.
La función de configuración define los pines del servo SIG de los servomotores S1 y S2. Aquí se utilizan los pines Arduino D9 y D10, pero también se puede utilizar cualquier pin PWM. La función de bucle comprueba la distancia y si la distancia está por debajo del umbral ajustable, el servomotor se mueve hacia la bienvenida. La Figura 3 muestra un extracto del código fuente.
construcción mecánica
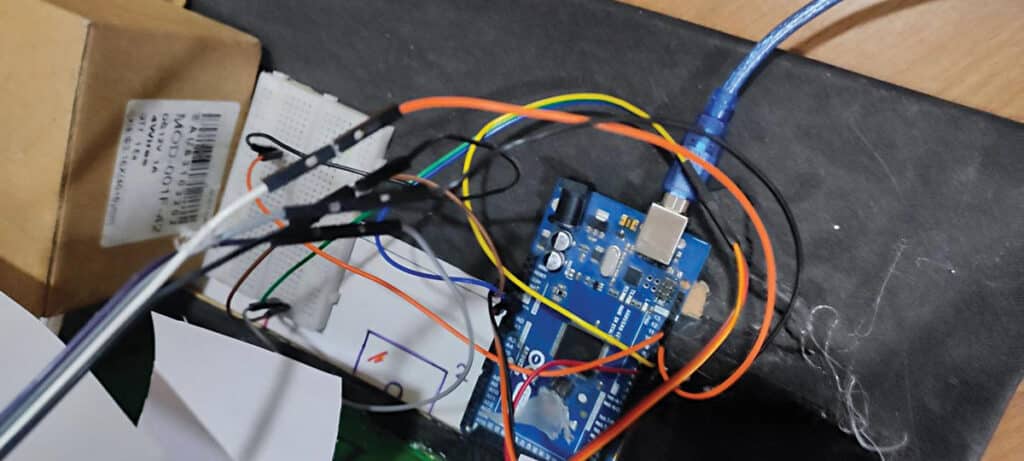
Para el diseño mecánico del robot, puedes diseñar cualquier cuerpo de tu elección, comprar uno en el mercado o imprimir en 3D una mano robótica de código abierto como inMoov. Para fines de simulación y prueba, simplemente puede conectar la mano de papel al eje del servo como se muestra en la Fig. 4.

Consulte también: Proyectos interesantes de Arduino.
Pruebas
Primero, cargue el código fuente en Arduino Uno usando cualquier computadora de escritorio o portátil. Ensamble el circuito en una placa de pruebas o PCB de uso general y complete las conexiones de acuerdo con el diagrama del circuito en la Fig. 2. El montaje mecánico de ambas manos debe dejarse a su elección, y el robot debe instalarse en la puerta de entrada de forma que cuando un robot pase cerca del sensor, los brazos y manos del robot se activen a modo de saludo.
El funcionamiento del robot es sencillo. Cuando alguien se acerca a 100 cm del sensor ultrasónico, el servo mueve sus manos y dice «Namaste». Cuando la persona se aleja del robot, los brazos y las manos del robot vuelven a su posición normal. El sensor ultrasónico actúa como los ojos del robot.
La Figura 5 muestra el montaje final del robot, que fue probado en diversas situaciones y demostró ser eficiente.
Navpreet Singh Tung está a cargo del Laboratorio de Robótica e Inteligencia Artificial en Sandeepani Gurukul en Pathankot, Punjab, India.
[ad_2]