")
[ad_1]
(Foco Nanowerk) Los científicos en robótica llevan mucho tiempo intentando desarrollar máquinas capaces de navegar en entornos complejos y realizar tareas exigentes replicando la notable adaptabilidad y funcionalidad de los organismos biológicos. El reino animal es hogar de numerosos ejemplos de criaturas que pueden nadar, gatear, tejer y correr sin esfuerzo a través de terrenos difíciles, impulsadas únicamente por los nutrientes que extraen de su entorno. Estas formas de vida logran sus impresionantes hazañas de movilidad no a través de componentes rígidos, controles precisos y fuentes de energía voluminosas de los robots tradicionales, sino más bien a través de la perfecta integración de materiales flexibles, detección y actuación distribuidas y un estrecho acoplamiento con su entorno.
Un ejemplo particularmente sorprendente de este enfoque de diseño bioinspirado es el campo emergente de la robótica blanda. A diferencia de los robots tradicionales, que están hechos de plástico duro y metal, los robots blandos están hechos de materiales flexibles y elásticos que pueden doblarse, estirarse y deformarse en respuesta a su entorno. Esta flexibilidad permite a los robots blandos navegar en espacios reducidos, adaptarse a objetos delicados y resistir daños por impactos o colisiones. Los robots blandos también pueden imitar mejor los movimientos complejos y no lineales de los organismos vivos, como el nado ondulante de las medusas o el rastreo peristáltico de las lombrices.
Sin embargo, desarrollar robots blandos verdaderamente autónomos y autosuficientes ha demostrado ser un desafío. Los sistemas robóticos blandos existentes a menudo dependen de actuadores neumáticos o hidráulicos que requieren bombas, válvulas y cables voluminosos, lo que limita su capacidad para operar en entornos remotos o confinados sin cables. Los intentos de crear actuadores más suaves y biológicamente realistas, como los basados en polímeros con memoria de forma o hidrogeles sensibles, han resultado prometedores, pero por lo general aún requieren calentamiento, enfriamiento o estimulación eléctrica controlados externamente. El objetivo final de un robot blando que pueda realizar un trabajo útil únicamente extrayendo energía de su entorno, como un animal extrayendo nutrientes de los alimentos, sigue siendo difícil de alcanzar.
Ahora, un equipo de investigadores de la Universidad de Jilin en China ha dado un paso significativo hacia esta visión de robots blandos verdaderamente autosuficientes. Como informa un artículo publicado en la revista Materiales funcionales avanzados (“Orugas blandas autosuficientes impresas en 4D impulsadas por un campo térmico constante”) han desarrollado un robot blando impreso en 4D que puede gatear y bailar utilizando solo la diferencia de temperatura entre una superficie calentada y el aire circundante. Al diseñar cuidadosamente la composición del material y la geometría de su robot, los investigadores pudieron lograr movimientos autosuficientes y realistas sin necesidad de cables, baterías o dispositivos electrónicos de control.
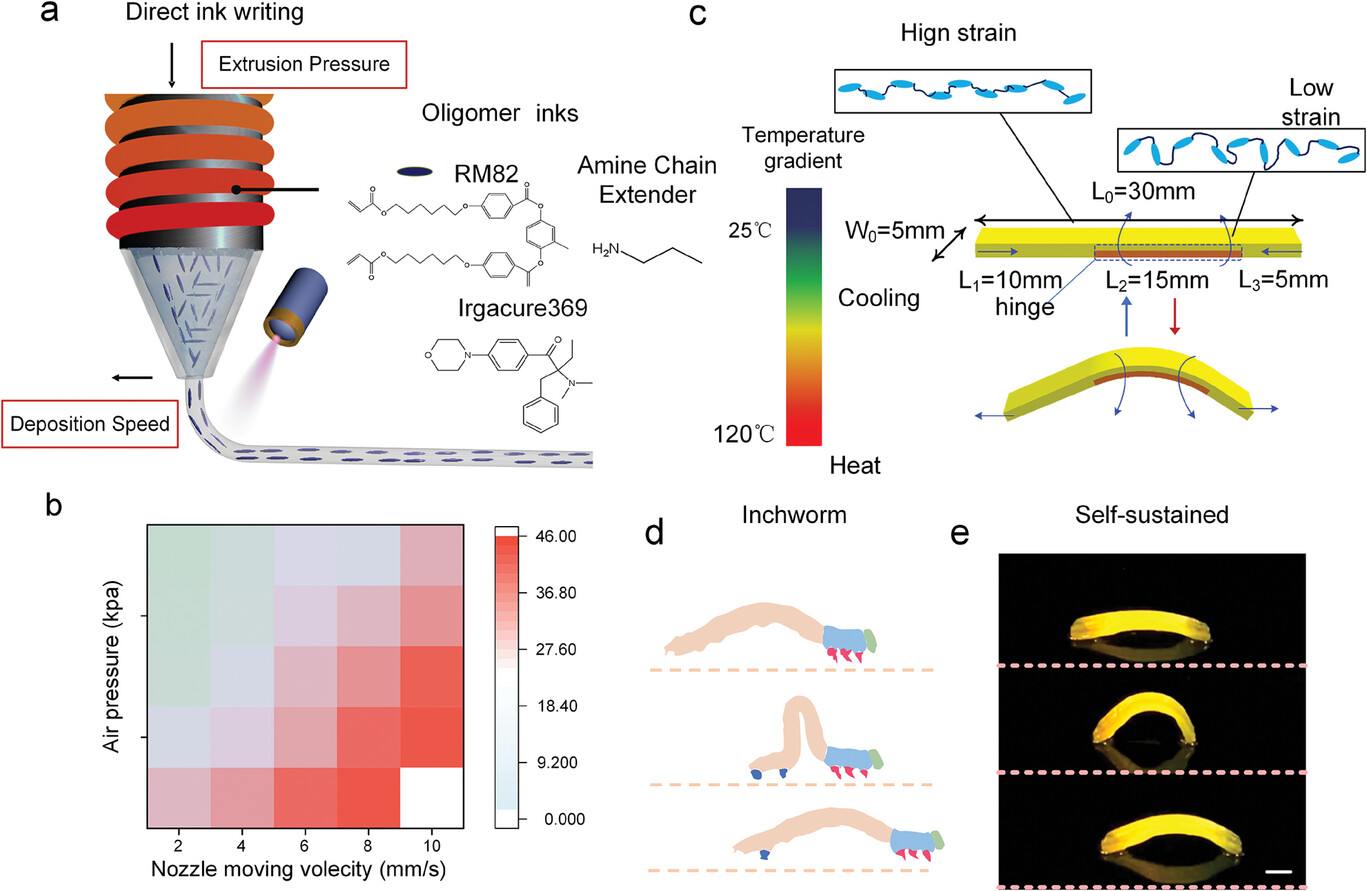
La clave de las impresionantes capacidades del robot reside en el uso de elastómeros de cristal líquido (LCE), una clase de materiales blandos similares al caucho que pueden sufrir grandes cambios de forma reversibles cuando se exponen al calor u otros estímulos. Los LCE contienen unidades moleculares en forma de varilla llamadas mesógenos que pueden alinearse en diferentes orientaciones, lo que permite que el material se contraiga o expanda en direcciones específicas a medida que cambia la temperatura. Al controlar con precisión la orientación de estos mesógenos durante el proceso de impresión 3D, los investigadores pudieron crear estructuras LCE planas que podían doblarse, torcerse y deformarse de maneras predecibles cuando se calentaban o enfriaban.
Para desarrollar un robot autónomo, el equipo diseñó una tira rectangular simple que consta de dos capas de LCE impresas una encima de la otra. La capa inferior presentaba una región descentrada donde la velocidad de impresión aumentaba durante la fabricación, lo que hacía que los mesógenos se alinearan más en esta región de «bisagra activa». Colocado sobre una placa caliente, esta disposición asimétrica hizo que el robot se curvara espontáneamente en un extremo cuando la bisagra activa se contraía más que el material circundante. A medida que la parte elevada del robot se enfriaba en el aire sobre la placa calefactora, se volvió más pesada que la parte que aún estaba en contacto con la superficie calentada, lo que provocó que el robot se volcara y continuara su movimiento de arrastre.
Al ajustar parámetros como la ubicación y la rigidez de la bisagra activa, el grosor de las capas de LCE y la temperatura de la placa calefactora, los investigadores pudieron lograr una locomoción sorprendentemente sofisticada y realista a partir de una estructura tan simple. Dependiendo de la geometría exacta de su bisagra, el robot podría arrastrarse de forma autónoma hacia adelante, hacia atrás o en círculos, e incluso abordar terrenos accidentados o embarrados como arena y caucho de silicona. El equipo también descubrió que girar el robot haría que realizara un encantador «movimiento de baile», balanceándose hacia adelante y hacia atrás mientras diferentes partes de su cuerpo alternaban entre períodos de calentamiento y enfriamiento.
Las implicaciones de este robot blando impreso en 4D se extienden más allá de su desempeño inmediato como un gusano artificial. El estudio muestra el inmenso potencial de los materiales responsivos como los LCE y las técnicas de fabricación avanzadas como la impresión 3D multimaterial para crear máquinas que desdibujan los límites entre lo vivo y lo inanimado. Al utilizar materiales que responden a estímulos para convertir los cambios en la energía ambiental directamente en trabajo mecánico útil, los investigadores están abriendo el camino hacia robots que podrían operar de manera continua y autónoma en entornos remotos o extremos, impulsados únicamente por calor residual, luz solar o gradientes químicos.
Además, la capacidad de imprimir en 3D robots blandos con propiedades de materiales heterogéneos y controlados con precisión abre nuevas oportunidades para incorporar sensores, actuación y computación directamente en sus cuerpos. Al igual que los organismos biológicos, los futuros robots blandos podrían procesar información y adaptar su comportamiento utilizando únicamente la inteligencia distribuida por toda su estructura material, sin necesidad de un control central ni siquiera de electrónica convencional. Combinados con los avances en curso en áreas como la cognición incorporada y la robótica del desarrollo, estos “materiales robóticos” algún día podrían conducir a criaturas artificiales verdaderamente realistas que crezcan, aprendan y evolucionen en respuesta a sus entornos.
El robot Inchworm impreso en 4D desarrollado por el equipo de la Universidad de Jilin ofrece una visión emocionante de este futuro biomimético. Aunque no se acerca en absoluto a la agilidad y versatilidad de incluso los animales más simples, representa una importante prueba de concepto para máquinas blandas materialmente inteligentes y respetuosas con el medio ambiente. Con más investigaciones sobre materiales adaptativos, fabricación aditiva y diseño bioinspirado, tal vez podamos lograrlo. ¿Algún día veremos robots que puedan navegar ágilmente por cualquier terreno, manipular hábilmente cualquier objeto y llevar a cabo de forma autónoma misiones complejas en el espacio, los océanos o incluso nuestros propios cuerpos, todo de forma tan segura, sostenible y realista como los organismos que sustentan? han inspirado.

De
Miguel
Berger
– Michael es autor de tres libros de la Royal Society of Chemistry: Nano-Society: Pushing the Boundaries of Technology, Nanotechnology: The Future is Tiny y Nanoengineering: The Skills and Tools Making Technology Invisible Copyright ©
Nanowerk LLC
¡Conviértete en autor invitado de Spotlight! Únase a nuestro gran y creciente grupo de autores invitados. ¿Acaba de publicar un artículo científico o le gustaría compartir otros desarrollos interesantes con la comunidad de nanotecnología? Cómo publicar en nanowerk.com.
[ad_2]