
[ad_1]
(noticias nanowerk) Tomar decisiones en grupo no es una tarea fácil, especialmente cuando quienes toman las decisiones son un enjambre de robots. Para aumentar la autonomía del enjambre en la percepción colectiva, un equipo de investigación del Laboratorio de Investigación de Inteligencia Artificial IRIDIA de la Universidad Libre de Bruselas propuso un enfoque innovador de autoorganización, en el que un robot a la vez actúa temporalmente como un «cerebro» para consolidar información sobre nombre del grupo.
Su artículo fue publicado en Computación inteligente (“Reducir la incertidumbre en la percepción colectiva mediante una jerarquía autoorganizada”). En el artículo, los autores demostraron que su método mejora la precisión de la percepción colectiva al reducir las fuentes de incertidumbre.
Al combinar aspectos del control centralizado y descentralizado, los autores obtuvieron los beneficios de ambos en un solo sistema, preservando la escalabilidad y la tolerancia a fallas de los enfoques descentralizados al tiempo que integraban la precisión de los enfoques centralizados. El enfoque permite a los robots comprender sus posiciones relativas dentro del sistema y reunir la información de sus sensores en un punto sin la necesidad de una red de comunicación global o estática o referencias externas. Además, el enfoque de los autores permite por primera vez la aplicación de métodos centralizados para fusionar información de múltiples sensores en un sistema autoorganizado. Hasta ahora, las técnicas de fusión multisensor sólo se han demostrado en sistemas totalmente centralizados.
Los autores probaron el enfoque de jerarquía autoorganizada comparándolo con tres enfoques de referencia y descubrieron que su enfoque sobresalía en términos de precisión, coherencia y tiempo de respuesta en las condiciones probadas. En la configuración experimental, un enjambre de drones simulados y robots terrestres recopilan datos espaciales bidimensionales detectando objetos dispersos en una arena y formando una opinión colectiva sobre la densidad de los objetos. Para determinar el número de objetos por unidad, los robots deben confiar en sus sensores de corto alcance.
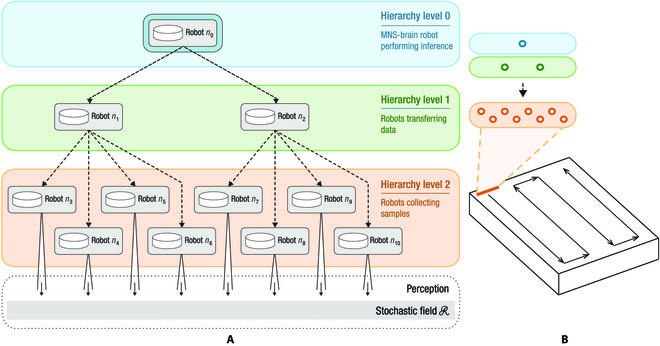
Según los autores, este nuevo enfoque utiliza una «red ad hoc jerárquica dinámica». Se basa en un tipo de marco general conocido como sistema nervioso fusionable, en el que los robots de cada nivel de la jerarquía desempeñan diferentes papeles en los procesos de toma de decisiones, y los robots pueden cambiar sus conexiones y posiciones relativas según sea necesario, aunque cada robot está limitado en esto, insista en comunicarse solo con sus vecinos inmediatos.
En el enfoque de los autores, el robot «cerebro» de nivel superior es responsable de realizar el razonamiento y enviar instrucciones de movimiento, mientras que los robots de nivel medio gestionan la transferencia de datos y participan en el equilibrio de los objetivos de movimiento globales y locales (por ejemplo, durante la evitación de obstáculos). , y la mayoría en el nivel más bajo realiza la recolección de muestras mientras gestiona el movimiento local.
Las investigaciones futuras sobre este tema podrían explorar métodos de inferencia avanzados y ampliar la solidez de los métodos de muestreo a tipos adicionales de fallas de robots o condiciones ambientales desafiantes, como entornos con grandes obstáculos o límites irregulares.
[ad_2]