
[ad_1]
(noticias nanowerk) Los científicos en robótica llevan mucho tiempo intentando equilibrar la destreza y la adaptabilidad de los animales con creaciones tecnológicas. Las criaturas de cuerpo blando como los pulpos pueden interactuar sin problemas en entornos inciertos gracias a su piel y músculos sensibles. Ahora, investigadores de la Universidad de Beihang, la Universidad de Tsinghua y la Universidad Nacional de Singapur han desarrollado un robot blando que combina electrónica estirable con movimiento bioinspirado. Su creación marca un progreso hacia robots ágiles que pueden percibir y manipular el mundo que los rodea.
Los animales se caracterizan por operar en ambientes caóticos y llenos de incógnitas. Considere cómo un pulpo atrapa a su presa. Despliega un brazo hacia su objetivo, utilizando un movimiento distintivo de «flexión y extensión» dirigido desde la base hasta la punta. Una vez que las ventosas del extremo establecen una sujeción temporal, una red neuronal en la piel del brazo detiene el movimiento de látigo y activa el agarre. Finalmente, el pulpo retrae su brazo para llevarse comida a la boca. Esta secuencia ilustra cómo los animales integran sensaciones táctiles a través de extremidades flexibles para completar tareas, incluso con entradas limitadas.
Desafortunadamente, la mayoría de los robots carecen de la gentileza, sensibilidad y adaptabilidad de las criaturas naturales. Las máquinas industriales convencionales tienen miembros rígidos en lugar de miembros flexibles. Y sin piel, desconocen por completo gran parte de su entorno. Estas robustas máquinas funcionan bien en entornos controlados como fábricas, pero fallan cuando se aventuran en el tumulto del mundo real.
Recientemente, la robótica blanda ha surgido como un paradigma alternativo para superar las limitaciones de la rigidez convencional. Los robots blandos hechos de polímeros elásticos o textiles pueden doblarse, torcerse y deformarse. Este cumplimiento facilita la operación en espacios confinados y caóticos y permite una interacción más segura entre humanos y robots. Sin embargo, la mayoría de los dispositivos existentes todavía carecen de percepción e inteligencia críticas.
Los robots blandos verdaderamente eficaces requieren piel sensorial, procesadores y controles distribuidos a lo largo de sus contornos cambiantes. Tal integración requiere componentes electrónicos elásticos en lugar de frágiles que puedan soportar tensiones mecánicas repetidas. Durante la última década, los científicos de materiales han logrado avances en la impresión de circuitos conductores utilizando metales líquidos y otras técnicas. Sin embargo, aplicar electrónica extensible a robots blandos con capacidad de respuesta sigue siendo un gran desafío.
Investigadores de China y Singapur informan ahora Robótica científica (“Octopus-Inspired Sensorized Soft Arm for Environmental Interaction”) sobre su robot blando de inspiración biológica que apunta a una solución. Su desarrollo, llamado Mimic de brazo de pulpo blando integrado en electrónica (E-SOAM), avanza la robótica blanda en varios frentes. Combina materiales y diseño innovadores para recrear la funcionalidad de un pulpo utilizando electrónica de metal líquido. Los resultados demuestran un desempeño hábil que antes era difícil de lograr sin componentes rígidos.
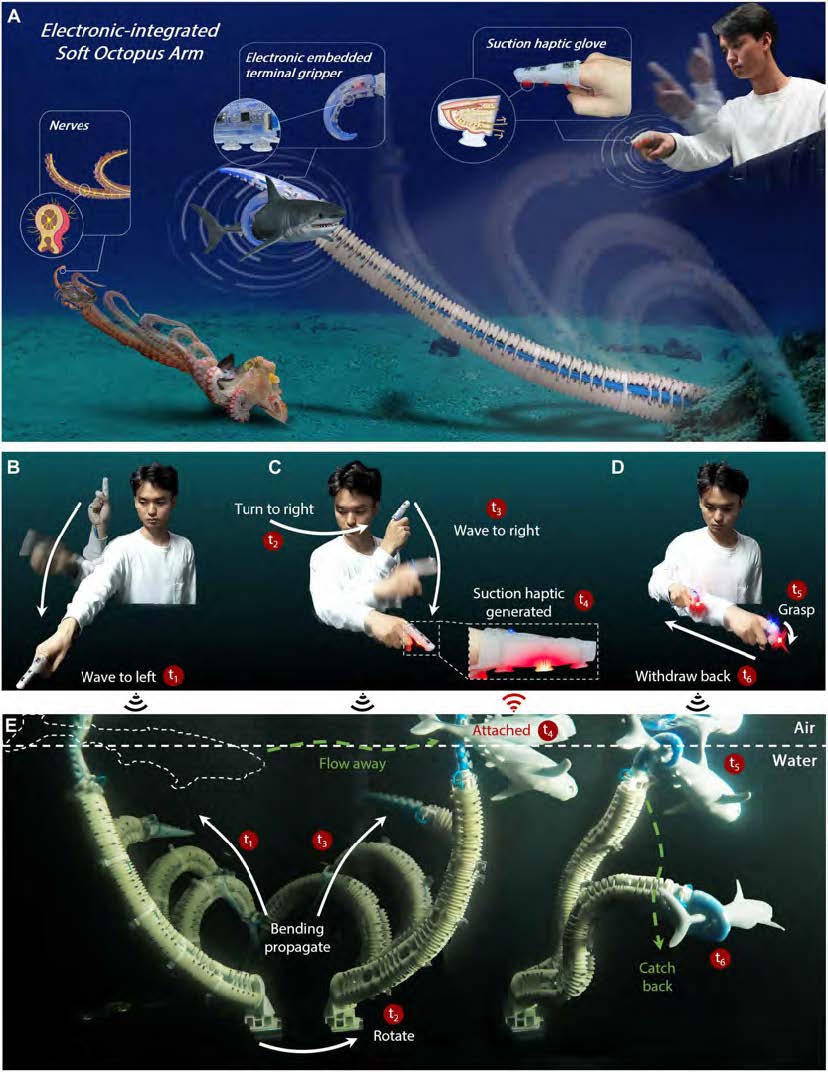
Conceptualmente, el E-SOAM intenta implementar una estrategia de “tocar-percibir-ejecutar” como los pulpos. Cuenta con un brazo delgado de cinco segmentos con un agarre suave en la punta que alberga circuitos y sensores de metal líquido impresos. Esta red extensible verdaderamente innovadora puede medir la flexión, la temperatura y la succión en tensiones superiores al 700% y al mismo tiempo transmitir señales de forma inalámbrica.
La integración de la electrónica en ventosas artificiales blandas y segmentos de brazos requirió perspicacia y perseverancia. El equipo tuvo que mapear cuidadosamente las tensiones previstas durante el movimiento y ubicar los circuitos en consecuencia. Las frágiles conexiones entre los rígidos chips del circuito integrado y la matriz de caucho circundante causaron dificultades tempranas. Sin embargo, mediante la optimización numérica y la tecnología de impresión de metal líquido, los problemas de conexión se fueron superando gradualmente sin que las funciones del sensor sufrieran.
Una vez ensamblado, la electrónica integrada del E-SOAM permite que su pinza blanda reconstruya la curvatura del brazo basándose en la salida de galgas extensométricas a lo largo de su longitud. Esta propiocepción ayuda al robot a percibir su propia forma durante una deformación dramática. Otra inspiración de los pulpos llegó en forma de una estrategia de propagación de flexión simple pero eficiente que los investigadores desarrollaron para controlar el movimiento del E-SOAM hacia los objetivos.
Además de la forma reflexiva, el E-SOAM también puede sentir el tacto. Las líneas conductoras de metal líquido en la parte inferior de las ventosas cambian de resistencia cuando se presionan contra las superficies. Esta información desencadena reflejos de agarre, similares a las ventosas, que indican a los brazos del pulpo que se curven aún más. Cada aspiradora contiene un circuito sensor independiente que proporciona una percepción táctil detallada.
Finalmente, el equipo probó las habilidades de agarre, agarre y manipulación de objetos de su robot blando. Con sistemas de visión o guía humana dirigiendo su movimiento, el E-SOAM podría atravesar espacios reducidos, distinguir gradientes de temperatura y utilizar la propagación de curvas coordinada para recoger objetos con su pinza. Utilizando retroalimentación háptica desde piel artificial hasta un guante portátil, un operador con los ojos vendados podría incluso controlar estas funciones de forma remota. Una interacción bidireccional tan matizada entre un humano y un robot blando en entornos inciertos es una hazaña.
Esta investigación proporciona una plantilla para integrar electrónica extensible en robots deformables para lograr un rendimiento orgánico. Sin embargo, todavía hay mucho margen de mejora. Actualmente sólo la pinza contiene sensores y procesadores especiales; Ampliar los rangos de detección a una porción más grande del brazo podría aumentar aún más el beneficio. Y la tecnología todavía no es suficiente para cubrir todo el espectro de comportamiento de un pulpo. Sin embargo, las ventajas sobre los robots rígidos convencionales son obvias.
En el futuro, existen muchas aplicaciones potenciales para máquinas responsivas que puedan interactuar de manera sensible con personas y entornos impredecibles. Los ejemplos incluyen búsqueda y rescate, inspecciones industriales, cirugía, dispositivos de asistencia y rehabilitación, dispositivos portátiles y más. A medida que los componentes se vuelven más duraderos y sofisticados, los robots blandos que integran electrónica distribuida y extensible podrían tener un profundo impacto en la sociedad, similar a oleadas anteriores de automatización. Pero esta vez, la mayor adaptabilidad y colaboración se acercan a la elegante experiencia del reino animal.
[ad_2]