")
[ad_1]
(noticias nanowerk) Imagine una infraestructura inteligente que se construye, transforma y repara automáticamente según sea necesario. Edificios que permiten que nuevos espacios crezcan orgánicamente cuando sea necesario y optimicen su distribución para siempre. Puentes que refuerzan o amplían obstáculos sin intervención humana. Y colonias en Marte construidas con materiales locales sin actividad extraterrestre por parte de los astronautas.
Esta tentadora visión de la materia programable robóticamente ha seducido a los investigadores durante mucho tiempo, pero a pesar del gran interés, el progreso tangible hacia estos objetivos siempre ha estado a nuestro alcance. Los obstáculos técnicos en áreas que van desde la fabricación a nanoescala hasta la coordinación de robots autónomos han excluido a los posibles arquitectos de futuras estructuras inteligentes. Hasta ahora.
Los científicos del Centro de Investigación Ames de la NASA han demostrado un sistema robótico modular que construye de forma autónoma rejillas a escala de un metro con una resistencia y rigidez sin precedentes para el autoensamblaje de la materia. Al separar la estructura de la actuación, el diseño innovador sugiere que la materia robótica programable finalmente está pasando de un concepto imaginativo a una realidad prometedora.
Los resultados fueron publicados en Robótica científica (“Metamateriales mecánicos ultraligeros, resistentes y autoreprogramables”).
El nuevo sistema combina bloques de construcción compuestos de polímeros livianos con robots autónomos simples para crear grandes estructuras reticulares con resistencia y rigidez competitivas. Esto representa un avance significativo hacia los exigentes requisitos de rendimiento, rendimiento y escalabilidad de la infraestructura y el sector aeroespacial.
A pesar del fuerte interés en investigación y desarrollo por parte del mundo académico, el ejército y empresas como Ikea, las estructuras autoorganizadas siguen estancadas en la escala de prototipos pequeños. La biología construye rutinariamente estructuras funcionales complejas a partir de componentes moleculares individuales, pero la autoorganización técnica ha demostrado ser enormemente difícil. Las primeras propuestas visionarias imaginaban futuros sistemas a nanoescala que diseñarían productos atómicamente precisos, pero enfrentaron obstinadas barreras de coordinación y fabricación.
Un trabajo pionero posterior desarrolló módulos robóticos magnéticos de un centímetro de tamaño que podían moverse y conectarse para formar formas arbitrarias. Sin embargo, las débiles fuerzas magnéticas limitaron la fuerza y la escalabilidad. Un enfoque alternativo utilizó pequeños brazos robóticos para agarrar bloques más grandes y conectarlos con conexiones mecánicas más fuertes. Pero los complejos robots agregaron significativamente más masa, diluyendo la relación fuerza-peso. Estas y otras plataformas de autoensamblaje demostraron capacidades importantes como la construcción autónoma, la autorreparación y la reconfiguración posterior al ensamblaje. Pero hasta ahora, ninguno de ellos ha logrado aprovechar todo el potencial disruptivo de la materia programable debido a la falta de resistencia, rigidez, escala, costo o velocidad de construcción.
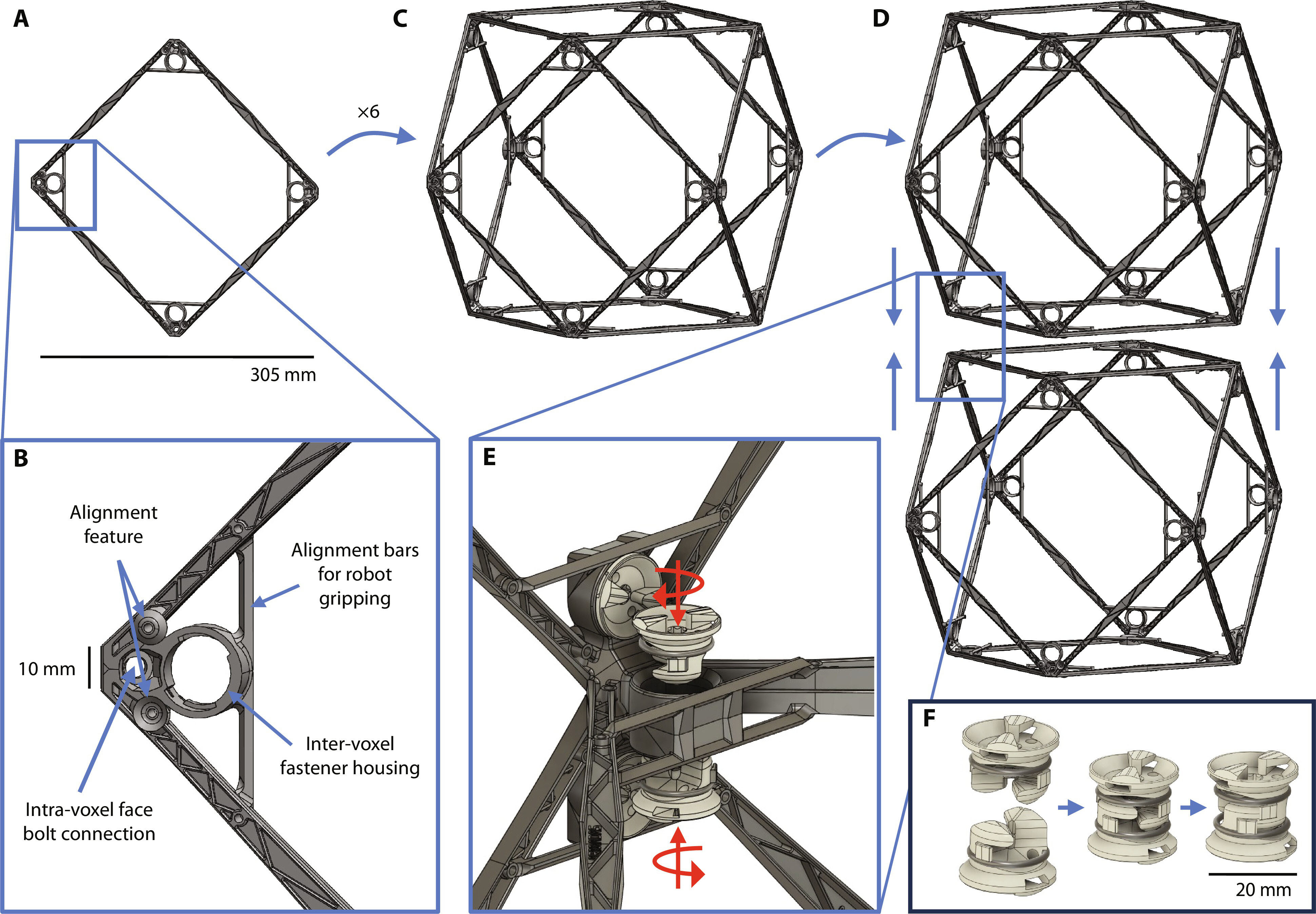
El nuevo sistema logra un rendimiento estructural récord para materia autoorganizada mediante la innovadora separación de componentes estructurales y de actuación. Los vóxeles de polímeros compuestos tipo Lego forman la estructura de celosía liviana y de alta resistencia. Luego, dos tipos de robots simples ensamblan los vóxeles y luego los reconfiguran. Utilizan la propia geometría de la rejilla para un posicionamiento preciso sin sensores externos. Esta clara separación entre el chasis y la locomoción reduce la masa y aumenta la confiabilidad.
Estructuralmente, los vóxeles están conectados uno frente al otro en patrones de diamantes repetidos para crear un material de red de cuboctaedro extremadamente liviano. Los sujetadores reversibles sin género en cada interfaz facial permiten a los robots conectar vóxeles de forma segura con una precisión constante y una fuerza de sujeción de 797 N.
En las pruebas de compresión, las matrices de vóxeles de 3x3x3 fallaron con cargas superiores a 9.000 Newtons. Esto corresponde a una fuerza específica prometedora de más de 11 kPa a densidades extremadamente bajas de alrededor de 0,01 g/cm3 – Competitivo con parrillas aeroespaciales de alto rendimiento. Los investigadores también midieron una rigidez de entre 1 y 2 MPa, que rivaliza con las armaduras de fibra de carbono disponibles comercialmente en términos de resistencia/peso. La caracterización cuantitativa confirma que el metamaterial reticular compuesto logra propiedades mecánicas adecuadas para infraestructuras, vehículos aeroespaciales y estructuras espaciales exigentes, y no solo para demostraciones a pequeña escala. Y las conexiones reversibles discretas permiten una futura corrección de errores autónoma que no sería posible con los materiales tradicionales.
Este rendimiento supera en órdenes de magnitud a las plataformas de materiales inteligentes autoorganizadas anteriores. Las mejores demostraciones de materia modular hasta la fecha han logrado una fuerza de menos de 100 kPa en densidades mucho más altas. Incluso los robots de celosía conceptualmente similares pero reconfigurados manualmente lograron sólo alrededor de una décima parte de la resistencia con cinco veces la densidad del nuevo sistema. Las comparaciones cuantitativas confirman que las redes robóticas actuales son más capaces de superar el dominio del «problema de los juguetes» y proporcionar actuaciones útiles a macroescala. Pero a diferencia de las arquitecturas ensambladas en talleres, la reconstrucción automatizada in situ permite aplicaciones que no toleran la presencia humana y al mismo tiempo maximizan la sostenibilidad.
En cuanto a la robótica, el equipo construyó dos tipos de robots de transporte autónomos que trabajan juntos para colocar vóxeles con precisión. Un robot de “carga” de cuatro patas más grande utiliza un brazo de agarre para transportar nuevos vóxeles desde el depósito de suministros al sitio de construcción. Allí, un robot “grúa” bípedo más simple retira los cubos del robot de carga y los coloca en la estructura de rejilla en crecimiento utilizando ayudas de alineación.
El robot grúa también puede desmontar vóxeles, lo que permite una reconfiguración posterior para autorreparación o modificación de propiedades. A medida que la grúa coloca nuevos vóxeles, un pequeño robot interno de «fijación» se introduce a través de las cavidades de la rejilla para alinear y atornillar los vóxeles nuevos y los existentes utilizando sujetadores mecánicos reversibles sin género. Los simples robots inalámbricos se coordinan mediante posicionamiento relativo y navegación a estima en lugar de una compleja visión por computadora, lo que reduce la necesidad de sensores.
En una demostración (ver vídeo arriba), el sistema ensambló de forma autónoma una estructura protectora de 256 vóxeles de un metro de ancho con paredes inclinadas, destacando su capacidad de construcción en voladizo. Los dos robots de transporte recorrieron más de 3 kilómetros y realizaron más de 14.600 manipulaciones con un 99% de éxito. El robot adjunto conectó con éxito 596 vóxeles con una confiabilidad del 95,8%. El montaje completo duró 4 días y, gracias al transporte simultáneo de vóxeles, se logró una prometedora tasa de construcción de 20.000 mm cúbicos/s. resultó.
El rendimiento probado ya cumple con los requisitos de aplicaciones aeroespaciales como antenas parabólicas, torres y estructuras de celosía orbitales. Y a diferencia de las formas monolíticas, la naturaleza discreta del sistema permite la corrección y reparación de errores de forma autónoma en el futuro.
Con un mayor desarrollo, dicen los investigadores, este paradigma de construcción de redes discretas podría formar literalmente bloques de construcción para una infraestructura de próxima generación asequible, resiliente y sostenible. La instalación, el mantenimiento, las actualizaciones y el reciclaje serían automatizados, flexibles y libres de residuos. El objetivo de la NASA es avanzar en la tecnología para construir puestos de avanzada alienígenas sin el astronauta EVA utilizando recursos de regolito locales. Las aplicaciones terrestres van desde refugios de emergencia y estructuras expedicionarias hasta arquitectura adaptativa que evoluciona fluidamente con las necesidades humanas. De manera aún más especulativa, la materia programable y autoorganizada promete una revolución en la ciencia de los materiales a medida que las fortalezas y la escala de producción continúan mejorando.
[ad_2]