
[ad_1]
(Foco Nanowerk) El campo de la robótica blanda tiene como objetivo desarrollar actuadores adaptables y compatibles que imiten las notables capacidades de los sistemas biológicos. Los actuadores robóticos tradicionales, compuestos de componentes rígidos y accionados por motores eléctricos o hidráulicos, destacan en velocidad y precisión, pero no pueden igualar la versatilidad y robustez de sus homólogos naturales. Por el contrario, los actuadores blandos aprovechan la flexibilidad inherente de materiales flexibles como polímeros y elastómeros para interactuar de forma segura con objetos delicados y adaptarse a entornos no estructurados.
Sin embargo, los mecanismos físicos que normalmente se utilizan para accionar actuadores blandos libres (como el hinchamiento de hidrogeles, la expansión térmica o la realineación de cristales líquidos) adolecen de tiempos de respuesta lentos, del orden de segundos a minutos.
Los intentos anteriores de acelerar el rendimiento de los actuadores blandos utilizando campos magnéticos han resultado prometedores, pero se han enfrentado a enormes desafíos de fabricación. Incrustar partículas magnéticas con una orientación controlada con precisión en matrices poliméricas blandas requiere equipos de impresión 3D especializados y fuertes campos externos, lo que dificulta la producción.
Como alternativa, algunos investigadores han incorporado componentes magnéticos rígidos prefabricados directamente en actuadores blandos. Sin embargo, sin un enfoque de diseño general para optimizar la integración de materiales duros y blandos, estos actuadores no podrían aprovechar al máximo su arquitectura híbrida para aumentar la velocidad y la resistencia manteniendo al mismo tiempo la flexibilidad y la durabilidad.
Ahora, un equipo de ingenieros se ha inspirado en la naturaleza para desarrollar un nuevo paradigma para construir potentes actuadores magnéticos blandos. Como se informó en un artículo reciente Materiales funcionales avanzados («Actuadores blandos biomiméticos ultrarrápidos sin ataduras con construcciones de hueso en carne accionadas por campo magnético») muestran cómo la combinación estratégica de «huesos» magnéticos rígidos con «carne» elastomérica permite máquinas blandas impulsadas magnéticamente que operan con una agilidad y precisión sin precedentes. mientras soporta un abuso mecánico significativo.
Este enfoque bioinspirado, que los autores llaman «construcciones de huesos en carne», marca un paso importante hacia actuadores blandos que comienzan a acercarse a las capacidades de los sistemas vivos.
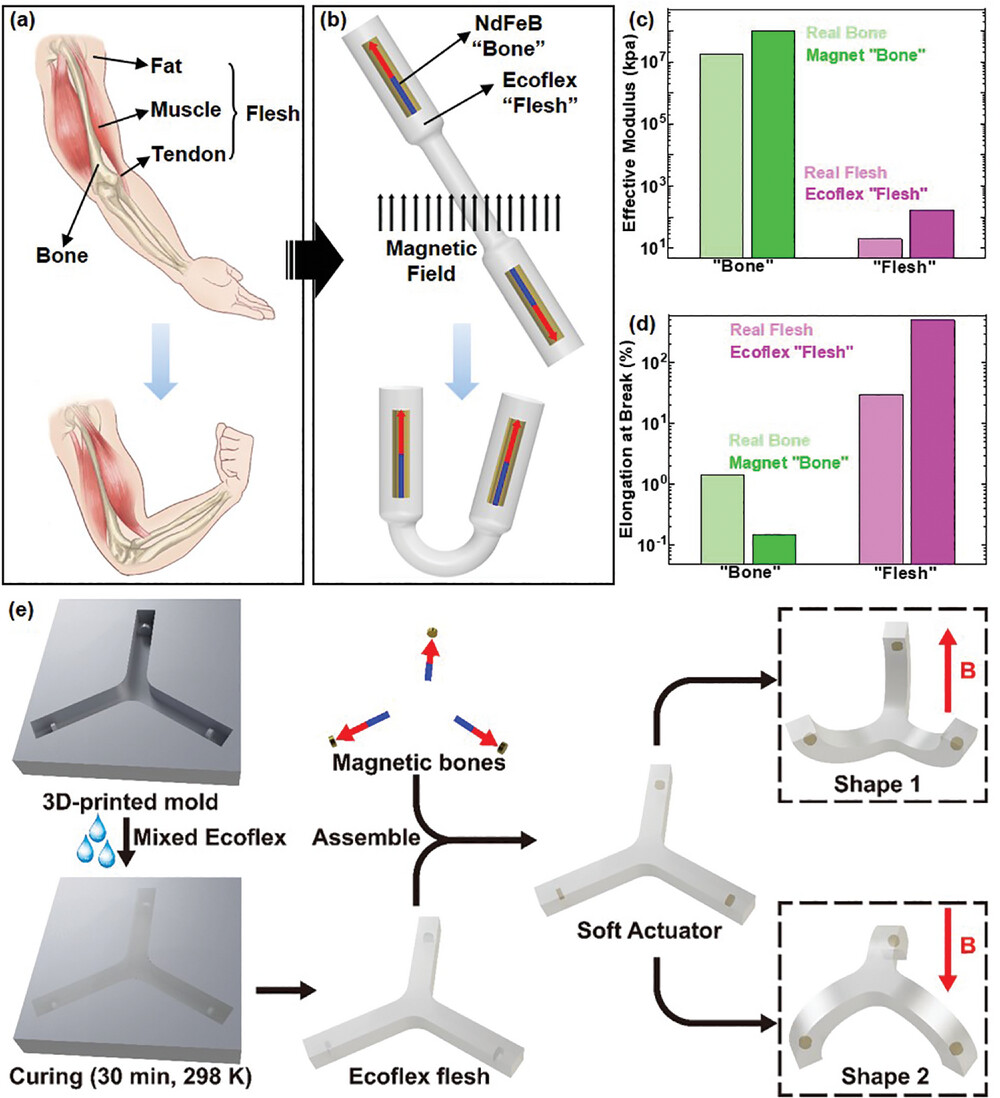
La idea clave detrás del diseño de hueso en carne es que las estructuras biológicas, como las extremidades humanas, integran elementos esqueléticos rígidos y tejidos blandos de una manera que mejora sinérgicamente la funcionalidad. Los huesos permiten movimientos rápidos y precisos al actuar como palancas rígidas, mientras que los músculos, tendones y piel flexibles protegen el esqueleto del impacto y proporcionan una interfaz tolerante con el medio ambiente.
Los investigadores se dieron cuenta de que podían aprovechar estas ventajas en sistemas sintéticos encapsulando imanes cilíndricos de neodimio de escala milimétrica en moldes de caucho de silicona moldeados.
En las estructuras resultantes, los imanes incrustados actúan como huesos simplificados, creando un torque para doblar el cuerpo blando cuando se aplica un campo magnético. Los cilindros magnetizados se pueden alinear en patrones individuales para lograr diferentes tipos de cambios de forma a medida que el elastómero circundante se expande y deforma.
Este enfoque desacopla efectivamente la fuerza de actuación de la flexibilidad: los potentes imanes transmiten fuerzas de manera eficiente, mientras que la matriz elástica proporciona alta resiliencia y resistencia a los golpes. Fundamentalmente, el proceso de fabricación es bastante simple y solo requiere materiales comerciales de bajo costo y procesos de moldeo estándar en lugar de equipos de magnetización especializados.
Para demostrar la versatilidad de sus actuadores de hueso en carne, los investigadores desarrollaron una serie de dispositivos de demostración que exhiben comportamientos útiles. Se fabricaron estructuras auxéticas que se contraen o expanden en múltiples direcciones incorporando imanes en membranas de silicona con series de agujeros y hendiduras.
Bajo un campo magnético, los cilindros rígidos giran para abrir o cerrar las geometrías en forma de malla, lo que resulta en cambios dramáticos en el área y la relación de aspecto de hasta 33% y 53% durante la contracción y expansión, respectivamente. Estos actuadores auxiliares completaron sus transformaciones de forma en 0,2 a 0,4 segundos, comparable a los actuadores blandos magnéticos más rápidos informados anteriormente, pero con un flujo de trabajo de fabricación muy simplificado.
Otros prototipos lograron transformaciones dinámicas de formas de 2D a 3D mediante distribuciones personalizadas de imanes y rigidez de elastómero. En un ejemplo, un disco de silicio plano con un patrón optimizado de áreas gruesas y delgadas se deformaba en una estructura similar a una mariposa cuando se accionaba, aumentando su altura 2,6 veces y reduciendo su proyección diagonal en un 28,5%.
En otro diseño, se unieron delgadas secciones elastoméricas entre secciones más gruesas con imanes incrustados para crear una estructura que recuerda al Estadio Nido de Pájaro en Beijing.
Un tercer prototipo utilizó una placa elastomérica de dos capas con imanes incrustados dispuestos en orientaciones específicas para crear un patrón de plegado más complejo similar al origami. Estas estructuras podrían servir potencialmente como dispositivos desplegables o superficies cambiantes.
El equipo también aprovechó las inestabilidades mecánicas para diseñar actuadores que puedan cambiar entre diferentes configuraciones estables bajo control magnético. Un mecanismo de botón biestable cambia entre dos estados estables: uno plano y otro con una cúpula central con bisagras. La transición entre estados se produjo mediante un rápido pandeo del elastómero, provocado por la rotación de los imanes incrustados.
Ampliando este concepto, un actuador multiestable que consta de una membrana elastomérica cilíndrica con 24 imanes integrados demostró una conmutación reversible entre cuatro configuraciones estables correspondientes a diámetros progresivamente más pequeños. Estos actuadores biestables y multiestables demuestran el potencial para controlar cambios de forma discretos en dispositivos blandos.
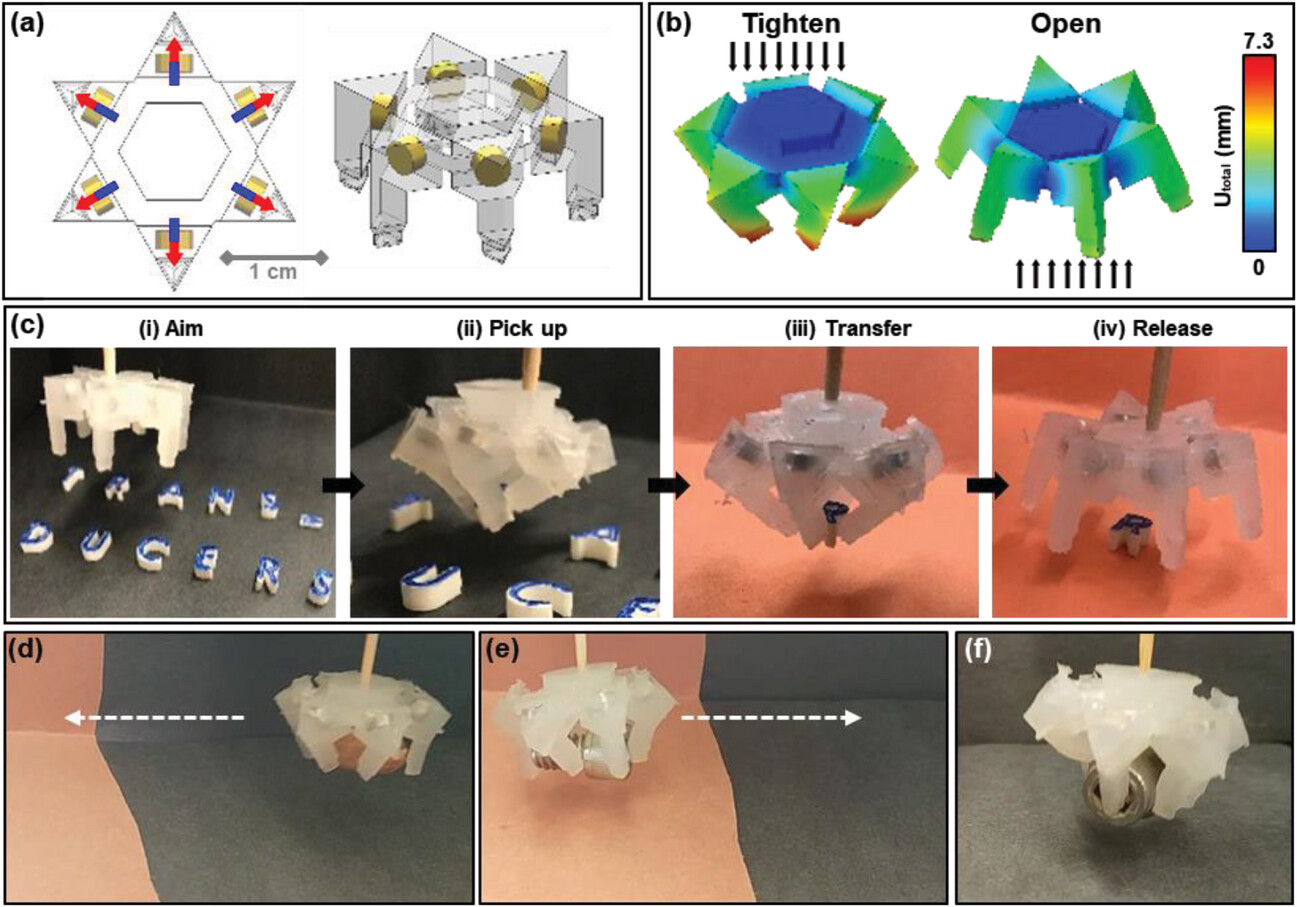
Finalmente, los investigadores construyeron una pinza con seis dedos para demostrar el potencial de una manipulación hábil. Los experimentos demostraron que la pinza puede agarrar y sostener objetos de diferentes formas y tamaños, incluida una letra impresa en 3D que pesa 0,3 gramos, un maní (0,8 gramos), un tornillo (4,5 gramos) y un conjunto de perno y tuerca que pesa 9,0 gramos. Estas pruebas demuestran la capacidad de agarrar y manipular una variedad de objetos pequeños relevantes para aplicaciones del mundo real.
La arquitectura ósea en carne ofrece varias ventajas sobre las tecnologías de actores blandos existentes. La alta densidad de energía magnética de los cilindros de neodimio integrados, combinada con su integración optimizada en la matriz flexible, permite velocidades de actuación muy rápidas comparables a las de los actuadores magnéticos blandos más rápidos del pasado. Al mismo tiempo, el elastómero flexible proporciona una excelente deformabilidad y resistencia al impacto, lo que ha sido confirmado por experimentos y simulaciones que muestran que los actuadores pueden soportar cargas mecánicas severas, como colisiones y compresiones a alta velocidad, sin sufrir daños.
Fundamentalmente, estas capacidades excepcionales no requieren una fabricación compleja: las piezas se pueden fabricar mediante procesos simples de moldeo e inserción magnética, utilizando únicamente materiales comerciales de bajo costo.
Al aprovechar los conocimientos de las estructuras biológicas en un entorno sintético, el paradigma del hueso en la carne proporciona un modelo para crear poderosas máquinas blandas que comiencen a cerrar la brecha con los sistemas naturales. Las demostraciones en este trabajo ilustran la capacidad de lograr funcionalidades útiles como cambio de forma auxética, transformación de plano a 3D, multiestabilidad y manipulación diestra junto con tiempos de respuesta rápidos y robustez. Los desarrollos futuros podrían permitir comportamientos aún más sofisticados al incorporar elementos magnéticos y estructurales adicionales para imitar la complejidad de los organismos reales.
Aunque todavía están lejos de la complejidad y eficiencia de los cuerpos vivos, los actuadores óseos señalan el camino hacia sistemas robóticos blandos que combinan la velocidad y precisión de los robots «duros» tradicionales con la adaptabilidad y resistencia de los organismos biológicos.
Cerrar esta brecha de rendimiento de larga data podría, en última instancia, conducir a máquinas blandas que apoyen e interactúen con personas en la medicina, la industria y más allá de una manera más segura y poderosa. Al mismo tiempo, el trabajo destaca el valor duradero de la inspiración biológica como fuente de soluciones creativas a viejos y nuevos desafíos técnicos.

De
Miguel
Berger
– Michael es autor de tres libros de la Royal Society of Chemistry: Nano-Society: Pushing the Boundaries of Technology, Nanotechnology: The Future is Tiny y Nanoengineering: The Skills and Tools Making Technology Invisible Copyright ©
Nanowerk LLC
¡Conviértete en autor invitado de Spotlight! Únase a nuestro gran y creciente grupo de autores invitados. ¿Acaba de publicar un artículo científico o le gustaría compartir otros desarrollos interesantes con la comunidad de nanotecnología? Cómo publicar en nanowerk.com.
[ad_2]