
[ad_1]
(noticias nanowerk) Un equipo de investigación dirigido por el Prof. TIAN Xingyou y el Prof. ZHANG /PTFE) actuadores fototérmicos programables basados en expansión térmica asimétrica.
El estudio fue publicado en Materiales funcionales avanzados como portada (“Actuadores fototérmicos de metal líquido programables inspirados en zarcillos para robots blandos”).
«Nos inspiramos en la forma en que el área sensible a las puntas de una planta en un lado se contrae para formar zarcillos», dijo el Dr. LI Xiaofei, primer autor del artículo. «El actuador en forma de zarcillo tiene una morfología inicial personalizable».
Los metales líquidos como nuevos materiales fototérmicos flexibles que se vuelven más resistentes sin polímeros de refuerzo están reemplazando a los materiales fototérmicos tradicionales para producir actuadores fototérmicos. Es crucial amplificar el efecto de los actuadores fototérmicos de metal líquido y convertirlos en movimientos robóticos.
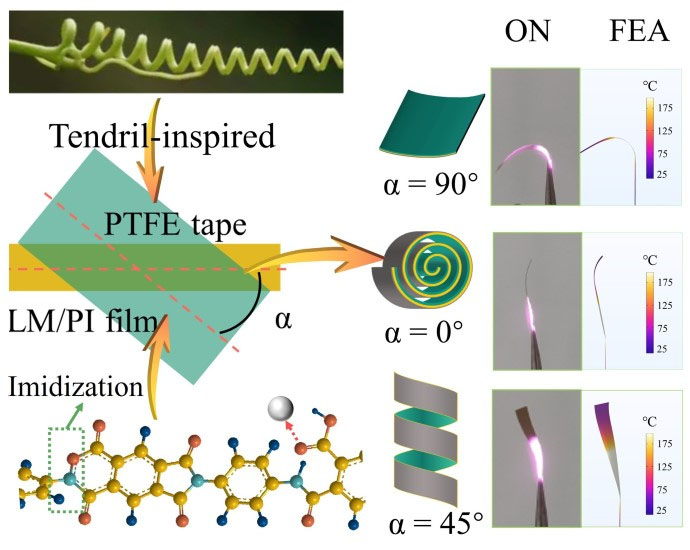
Como parte de esta investigación, los científicos construyeron un actuador fototérmico utilizando una película de metal líquido/poliimida (LM/PI) y cinta de PTFE que imita la capacidad de las plantas para buscar la luz solar. Utilizaron película LM/PI como soporte y capa fototérmica, mientras que la cinta de PTFE actuó como un protoplasma que puede contraerse y doblarse.
«Si unes la cinta de PTFE a la película LM/PI desde diferentes ángulos, se riza como zarcillos y puedes obtener diferentes formas, por eso la llamamos programable», dijo LI Xiaofei.
El actuador resultante exhibió una gran deformación, una respuesta rápida, una excelente estabilidad y una alta capacidad de carga. Promoverá la investigación y la aplicación práctica en robots flexibles, dispositivos inteligentes y sistemas biónicos.
Además, los investigadores modelaron el actuador y predijeron con precisión la morfología de flexión mediante análisis de elementos finitos. Basándose en la programabilidad de la morfología inicial y la predicción del modelo, los investigadores desarrollaron con éxito robots que gatean, ruedan, nadan, agarran y manipulan.
Según el equipo, este nuevo actuador allana el camino para un mayor desarrollo de actuadores fototérmicos en sistemas biónicos y robótica.
[ad_2]