
[ad_1]
(noticias nanowerk) En el futuro, los robots blandos podrán realizar tareas que los robots convencionales no pueden realizar. Estos robots blandos podrían usarse en terrenos de difícil acceso y en entornos donde estén expuestos a sustancias químicas o radiación que dañarían a los robots metálicos controlados electrónicamente. El requisito previo para ello es que estos robots blandos puedan controlarse sin ningún tipo de electrónica, lo que todavía representa un desafío durante el desarrollo.
Un equipo de investigadores de la Universidad de Friburgo ha desarrollado módulos lógicos neumáticos impresos en 3D que controlan los movimientos de robots blandos utilizando únicamente la presión del aire. Estos módulos permiten la conmutación lógica del flujo de aire y, por lo tanto, pueden imitar el control eléctrico. Los módulos permiten por primera vez producir robots blandos flexibles y sin componentes electrónicos íntegramente en una impresora 3D a partir de material de impresión de filamentos convencional.
El equipo alrededor del Dr. Stefan Conrad, Dr. Falk Tauber, Joscha Teichmann y el Prof. Dr. Thomas Speck, del grupo de excelencia «Sistemas de materiales vivos, adaptativos y autónomos desde el punto de vista energético (livMatS)», ha publicado sus resultados en una prestigiosa revista especializada. Robótica científica (“Lógica neumática digital impresa en 3D para controlar actuadores de robots blandos”).
«Nuestro diseño permite que cualquier persona con experiencia en impresión 3D cree dichos módulos lógicos y los utilice para controlar un robot blando sin la necesidad de equipos de impresión de alta gama», afirma Conrad. «Este es un paso importante hacia circuitos de control neumáticos completamente libres de electrónica, que en el futuro podrán sustituir componentes eléctricos cada vez más complejos en robots blandos».
Los módulos pueden realizar operaciones booleanas y dirigir flujos de aire específicamente hacia elementos móviles.
Los módulos constan de dos cámaras de presión. Un canal impreso en 3D corre entre estas cámaras. Al comprimir el canal, las cámaras en expansión pueden detener el flujo de aire dentro de él y regularlo como una válvula. Al abrir y cerrar específicamente la válvula, los módulos pueden ejecutar las funciones lógicas booleanas «Y», «O» y «NO», similares a los circuitos eléctricos, y dirigir el flujo de aire hacia los elementos de movimiento del robot blando.
La función que realiza el módulo individual está determinada por las cámaras en las que se introduce la presión del aire. Dependiendo del material elegido, los módulos pueden funcionar con una presión de entre 80 y más de 750 kilopascales. En comparación con otros sistemas neumáticos, tienen un tiempo de respuesta rápido de unos 100 milisegundos.
Amplia gama de aplicaciones
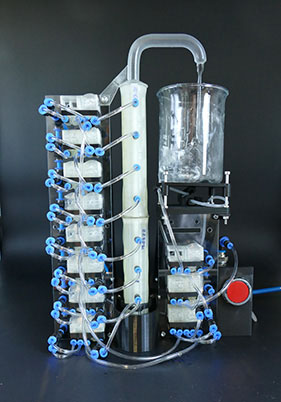
“Los posibles usos de estos módulos son enormes. Desarrollamos un robot andador flexible impreso en 3D controlado por un circuito integrado que utiliza presión de aire. La flexibilidad de los módulos lógicos se refleja en el hecho de que este andador puede soportar incluso la carga de un coche que pasa por encima”, afirma Tauber. «Como ejemplo de sistemas de control más complejos, también hemos desarrollado una máquina de bebidas sin electrónica».
[ad_2]