
[ad_1]
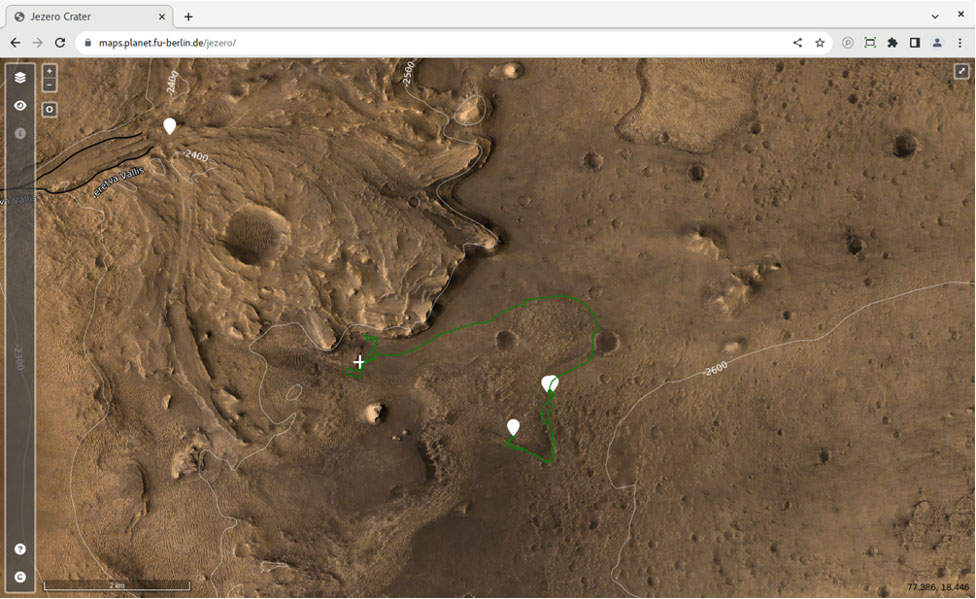
(Noticias de Nanowerk) Los exploradores de Marte en ciernes ahora pueden realizar una caminata por el lugar de aterrizaje del rover Mars 2020 Perseverance de la NASA con un mapa interactivo cargado con imágenes orbitales, datos del terreno y vistas panorámicas sintéticas y reales en 3D del cráter Jezero y sus alrededores.
El mapa, al que se puede acceder a través de un navegador web estándar, fue presentado en el Europlanet Science Congress (EPSC) 2022 en Granada, España, por Sebastian Walter de Freie Universität Berlin.
“El mapa es la herramienta perfecta para planificar una futura visita a Marte, con una interfaz interactiva que le permite elegir entre una variedad de conjuntos de datos de referencia disponibles. Algunas de las pendientes son bastante empinadas, ¡así que ten cuidado con ellas si quieres evitar un consumo excesivo de oxígeno!”, dijo Sebastián Walter. “Para tener una idea real de lo que le espera en su futuro viaje a Marte, puede hacer clic en cualquiera de los íconos de marcador de punto de ruta para ingresar a una vista 3D de pantalla completa o, si tiene una configuración de realidad virtual, a un entorno totalmente inmersivo. Incluso puedes escuchar los sonidos del rover si te paras cerca, pero no lo toques, contaminarás las sondas».
El mapa permite a los excursionistas virtuales acercar y alejar y desplazarse rápidamente por las escenas, lo que les permite explorar el paisaje desde grandes escalas hasta detalles centimétricos. Algunas de las panorámicas de 360° integradas en los waypoints se representaron sintéticamente a partir de imágenes orbitales. Otros son verdaderos panoramas compuestos por una multitud de imágenes fijas capturadas por el instrumento de cámara Mastcam-Z a bordo del rover Perseverance de Mars 2020 y proporcionadas por la Universidad de Arizona. Los sonidos fueron grabados por el instrumento SuperCam en la misma misión del rover.
La capa base del mapa es un conjunto de datos combinados que se originan a partir de tres instrumentos diferentes que actualmente orbitan Marte: el HRSC en Mars Express y los instrumentos Context Camera (CTX) y High Resolution Imaging Science Experiment (HiRISE) en Mars Reconnaissance Orbiter (MRO) . Los datos de HiRISE fueron proporcionados por el equipo de Navegación Relativa al Terreno (TRN) del Laboratorio de Propulsión a Chorro (JPL).
El mapa de Jezero se basa en el portal de datos del instrumento Mars Express High Resolution Stereo Camera (HRSC) de la ESA, que proporciona herramientas para visualizar y difundir grandes cantidades de imágenes de Marte y datos del terreno en un entorno en línea.
«Originalmente desarrollamos el mapa Jezero como una aplicación de divulgación para complementar la herramienta HRSC Mapserver, que apoya a los científicos profesionales en la exploración de la superficie de Marte», dijo Sebastian Walter. “Pero a medida que el rover continúa brindando más y más imágenes de alta resolución e incluso grabaciones de audio, está demostrando ser la herramienta perfecta para visualizar de forma inmersiva esos datos en un contexto científico”.
[ad_2]