
[ad_1]
(noticias nanowerk) La microrrobótica ha avanzado rápidamente en los últimos años, permitiendo a los científicos construir máquinas diminutas capaces de penetrar entornos de difícil acceso desde el interior del cuerpo humano hasta vertederos contaminados. Conducir estos pequeños robots requiere soluciones inteligentes porque su pequeño tamaño significa que operan en un dominio dominado por la viscosidad en lugar de la inercia. Un enfoque popular utiliza la compresión y rarefacción repetidas de burbujas de aire inducidas por ondas acústicas para crear microcorrientes que pueden impulsar los movimientos del robot. Sin embargo, la fragilidad de las burbujas individuales y la producción limitada de fuerza han obstaculizado su adopción generalizada.
Los investigadores llevan mucho tiempo inspirándose en la biología para los robots. Ahora, un equipo de la Universidad de Twente, dirigido por Sarthak Misra, está recurriendo al mundo de los metamateriales acústicos para desarrollar un nuevo y potente diseño de microrobot impulsado acústicamente. Su enfoque bioinspirado podría abrir nuevas posibilidades para el uso de microrobots en muestreo biológico, medicina clínica, remediación ambiental y más.
El equipo informó sus hallazgos en Sistemas inteligentes avanzados (“Flujo activado acústicamente en microrobots impulsados por burbujas de resonancia axialmente simétricas”).
Burbujas como bloques de construcción metamateriales.
Los metamateriales manipulan las ondas sonoras o la luz de formas no convencionales repitiendo elementos estructurales, llamados células unitarias, en patrones periódicos. Esta arquitectura interna que se repite periódicamente interactúa con las ondas incidentes y produce propiedades sorprendentes, como un índice de refracción negativo. Al dispersar muchas burbujas en una matriz organizada, los científicos se dieron cuenta de que podían crear metamateriales acústicos con propiedades acústicas adaptadas de forma única.
La investigación sobre estos “metamateriales de burbujas” se aceleró después de que se demostraron sus aplicaciones exóticas, como el enmascaramiento del ruido submarino. Sin embargo, hasta la fecha, casi todos los diseños utilizan burbujas relativamente grandes, con un diámetro superior a 300 µm. A pesar de su utilidad potencial, los científicos han tenido dificultades para crear metamateriales acústicos funcionales con microburbujas de menos de 100 µm.
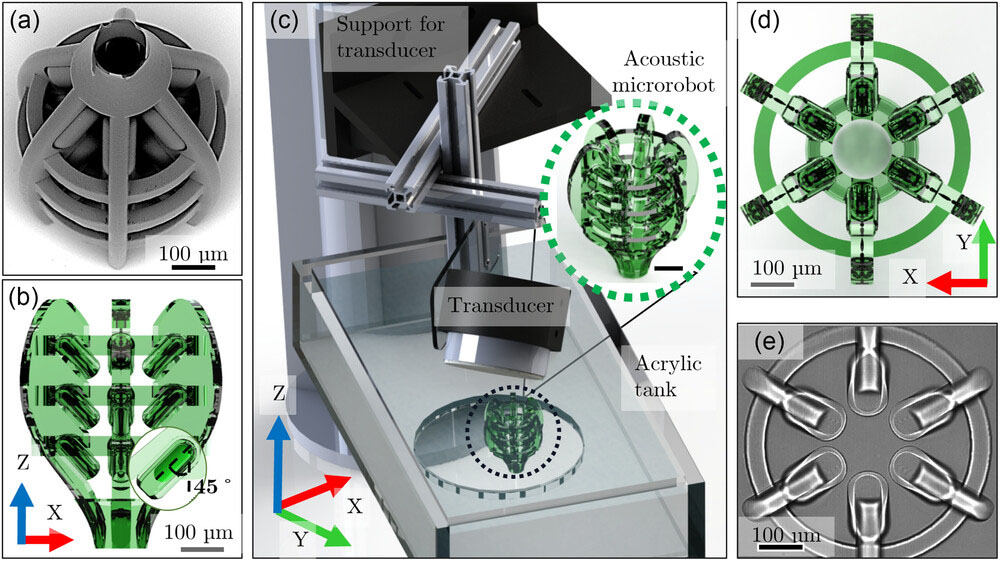
El equipo de UTwente se preguntó si podrían utilizar los principios de los metamateriales de microburbujas acústicas no sólo para el encubrimiento acústico, sino también para mejorar el diseño de robots a microescala. Su nuevo microrobot distribuye 18 microburbujas resonantes con una longitud de 100 µm, que actúan como células unitarias metamateriales, en un patrón axisimétrico 3D. A pesar del desafío técnico que supone la microfabricación de una estructura de este tipo, esta arquitectura ofrece importantes ventajas.
Más burbujas, más flujo
En los microbots, las burbujas tienen un doble propósito: como motores a bordo y como motores de propulsión. Las microburbujas individuales vibran fuertemente cuando son excitadas en su frecuencia de resonancia por ondas sonoras incidentes, creando un fuerte flujo local conocido como microstreaming. Sin embargo, por debajo de aproximadamente 300 µm de diámetro, la viscosidad limita severamente la oscilación de las burbujas. Esto limita la fuerza propulsora disponible y requiere una estimulación acústica de alta intensidad, lo que provoca bioefectos nocivos.
Afortunadamente, lo que les falta a las microburbujas en la generación de fuerza individual, lo compensan con el trabajo en equipo. El grupo de Twente reconoció que un acuerdo colectivo organizado aumenta el flujo neto de fluido más allá de la suma de las contribuciones de las burbujas individuales. Al superponer coherentemente las vibraciones de múltiples microburbujas, producen efectos de microflujo significativamente mejorados que permiten la propulsión y manipulación de robots.
Mientras que los diseños de microbots anteriores colocaban solo unas pocas burbujas en patrones lineales o radiales suaves, la arquitectura axisimétrica 3D inspirada en metamateriales del equipo con 18 burbujas en simetría periódica permite corrientes de flujo más fuertes a lo largo de un eje central utilizando ultrasonido de menor intensidad. Los experimentos de seguimiento de partículas revelaron un aumento de casi el 80% en la velocidad máxima de la microcorriente en comparación con su microrobot de 6 burbujas anterior en las mismas condiciones acústicas. Esto sugiere que la disposición de burbujas colectivas hace un mejor uso de la energía acústica disponible.
Rediseñando microrobots como sistemas macroscópicos
En lugar de miniaturizar aún más, como es la tendencia predominante en la microrrobótica, los investigadores decidieron ampliar su diseño. La fabricación del robot mediante impresión 3D de alta resolución con escritura láser directa permite la integración de características estructurales sutiles, como esquinas reentrantes que estabilizan pasivamente las burbujas sin la necesidad de una química especial en la superficie. Fundamentalmente, aumentar la estructura general a una escala de 0,5 mm hace que sea mucho más fácil de manejar e implementar que los diseños típicos a escala de micras.
Contrariamente a la intuición, la ampliación abre nuevas posibilidades. Aunque tiene 18 microburbujas, cada una de 100 µm de largo, como componentes funcionales, la plataforma de escala milimétrica se comporta esencialmente como un sistema robótico de escala macro. Sin embargo, conserva todas las ventajas de rendimiento inherentes a las microburbujas en comparación con las burbujas más grandes, en particular la capacidad de oscilar a altas frecuencias en respuesta a ultrasonidos de alta frecuencia. Esta estrategia híbrida, que combina lo mejor de ambos mundos, podría convertirse en un nuevo paradigma en la ingeniería microrrobótica.
Utilice microrobots altamente ágiles
Para demostrar el poder de su Millibot accionado acústicamente, los investigadores demostraron cómo puede aspirar y eliminar la suciedad mediante succión inducida por flujo. Esta capacidad de flotación y limpieza podría ser útil para tareas de muestreo biológico o eliminación de desechos en espacios reducidos o de difícil acceso.
Cuando se activan con frecuencias ultrasónicas específicas de alrededor de 65-70 kHz, las microcorrientes periódicas generan suficiente fuerza para permitir que el microrobot se alinee verticalmente y flote suavemente. Al cambiar de frecuencia, su movimiento se modula, lo que permite transportarlo a distancias de más de diez veces el diámetro del robot. Utilizando estas corrientes de flujo poderosas pero controlables con precisión, el robot puede atraer micropartículas y células vivas cercanas y filtrarlas en su canal interno. Luego arroja la suciedad acumulada lejos de la superficie.
Con un mayor desarrollo, estos milibots accionados acústicamente podrían proporcionar capacidades de extracción y filtrado sin contacto más allá de los actuales dispositivos de tamizado a microescala. Su capacidad de levitar permite el acceso a través de terrenos complejos en 3D. Esto podría ser invaluable para tomar muestras de tejido o biofluidos en grietas del cuerpo humano para biopsias o análisis de laboratorio en un chip. También es adecuado para la circulación en dispositivos microfluídicos complejos para dirigir y manipular dinámicamente flujos y partículas.
Fuera de los contextos biológicos, los equipos de robots desplegados en masa pueden resultar útiles para los esfuerzos de remediación ambiental debido a su capacidad para penetrar espacios porosos contaminados en los suelos para adsorber contaminantes químicos o transportar perlas enriquecidas con enzimas para catalizar la descomposición de desechos. Su versatilidad, junto con la facilidad de control y rendimiento acústico, los hacen muy adecuados para su uso en entornos remotos o peligrosos donde no es posible la intervención humana directa.
Impacto más amplio
Al desarrollar microrobots con nuevas capacidades y al mismo tiempo simplificar la producción y el manejo, la investigación del equipo de Twente demuestra los beneficios de aplicar principios de metamateriales acústicos de formas no convencionales. Su rediseño creativo del paradigma del ensamblaje ordenado de burbujas introduce nuevas ideas en microrrobótica y microfluidos. Demuestra que la hibridación de microcomponentes con plataformas más grandes puede mejorar significativamente el rendimiento del sistema. Esto refuta la creencia popular de que la miniaturización es intrínsecamente superior.
Además, la introducción de un esquema de fabricación simplificado que no requiere modificaciones químicas extensas de la superficie ni piezas móviles a nanoescala hace que la adopción de la nueva tecnología sea mucho más fácil. Al demostrar que la funcionalidad a microescala no equivale a construcciones a microescala, allanan el camino para que los ingenieros utilicen herramientas comunes de creación rápida de prototipos, como impresoras 3D, para ayudar a desarrollar la próxima generación de microrobots con propulsión acústica.
La utilidad demostrada de los robots para el muestreo biológico y la eliminación de desechos sugiere aplicaciones potenciales en dispositivos de laboratorio en un chip para diagnóstico en el lugar de atención, captura de toxinas y control de calidad de microfluidos, incluso en contextos con recursos limitados y economías en desarrollo. Si bien todavía queda un desarrollo significativo por hacer antes de que estos microrobots lleguen a la clínica o al campo, el estudio representa un primer paso importante para permitir soluciones de microrobots del mundo real para la medicina, la protección del medio ambiente y más.
[ad_2]