
[ad_1]
Investigadores de la Universidad de California, Berkeley, han inventado un robot único inspirado en un cangrejo topo excavador que puede excavar verticalmente.
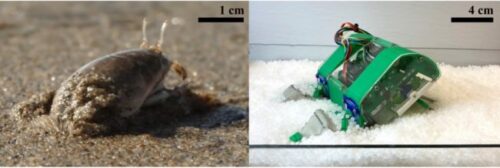
El proceso por el cual los cangrejos topo cavan arena en las playas parece muy simple, pero es muy difícil moverse hacia abajo a través de medios granulares como arena y tierra, cuanto más profundo se cava, más fuerza se debe usar para mover los gránulos hacia atrás. Es por eso que Hannah Stuart, profesora asistente de ingeniería mecánica, y su equipo han desarrollado robots especiales de una sola pierna que pueden enterrarse verticalmente. Este robot de excavación se llama EMBUR (EMerita BUrrowing Robot), que implementa un diseño de patas único para lograr un movimiento hacia abajo, similar a la forma en que los cangrejos topo del Pacífico se entierran en la arena de la playa.
Treers, autor principal del estudio y Ph.D. Un estudiante de ingeniería mecánica del grupo de investigación Destreza incorporada de Stuart dijo: «Ha habido algunos avances recientes en la creación de patas anisotrópicas para medios granulares, pero esta es la primera vez que se implementan con éxito en un robot de excavación libre». EMBUR puede mejorar nuestra comprensión científica de otros animales excavadores que son difíciles de observar y estudiar bajo tierra. «Los modelos robofísicos o prototipos robóticos como EMBUR pueden ser herramientas que ayuden a los biólogos a comprender mejor la biomecánica de estos animales», dijo Treers.
Los investigadores fabricaron una excavadora de patas verticales y diseñaron las patas del robot con una respuesta de fuerza anisotrópica, lo que significa que experimentan una fuerza mucho mayor en una dirección que en la otra. Las piernas de tela suave de este robot se expanden para generar grandes fuerzas durante la brazada de potencia, pero se pliegan y contraen durante la brazada de regreso como un nadador. Los investigadores también tuvieron que encontrar la manera de evitar que los granos de arena entraran y atascaran los mecanismos del robot, aunque esta toma está inspirada en el cangrejo topo del Pacífico.
Ella continuó: «Creamos una cutícula que imita la membrana artrodial de los cangrejos topo, formando un material suave y flexible que recubre las aberturas de las articulaciones para evitar que entren los gránulos, pero aún así permite el libre movimiento». utiliza una técnica de modelado conocida como arrastre teoría de la fuerza [RFT] para modelar las fuerzas a las que están sujetas las piernas durante sus trayectorias de barrido», dijo Treers. «RFT nos ayudó a comprender los tipos de geometrías y comportamientos de los robots que permitirían la excavación más exitosa».
“Planeamos mejorar el diseño para permitir una excavación más profunda y la exploración de mejores métodos de modelado como DEM [Discrete Element Methods]poder predecir el comportamiento del robot”, dijo Treers. «Algún día me encantaría que este robot pudiera cavar como un animal en entornos de playa reales y alternar entre correr, nadar y cavar».
Esta investigación podría tener una amplia gama de aplicaciones, tales como Estos incluyen la medición de la calidad del suelo de posibles sitios agrícolas, ingeniería geotécnica, recopilación de datos marinos y construcción y excavación. También podrían servir como pequeñas anclas desplegables de naves marinas o espaciales para permitir el trabajo en equipo en red entre robots.
Haga clic aquí para ver el trabajo de investigación publicado y el video de demostración
[ad_2]