
[ad_1]

Este sistema de detección de caídas IoT ofrece una solución proactiva, ideal para quienes buscan aumentar la seguridad de sus seres queridos o de quienes corren riesgo de caerse.
Las caídas representan un riesgo grave, especialmente para las personas mayores y las que padecen afecciones médicas.
Con este sistema de detección de caídas basado en IoT, se pueden recibir notificaciones instantáneas en un teléfono móvil en caso de caída. Esto permite una respuesta rápida y potencialmente puede prevenir impactos graves.
Utilizando un giroscopio de seis ejes y un sensor de aceleración y un microcontrolador, podemos detectar y medir cambios en el movimiento y la orientación. Blynk se puede utilizar para crear una interfaz fácil de usar para recibir notificaciones y alarmas.
Se explica en detalle la implementación de hardware y software, incluida la configuración del sensor MPU6050 y el microcontrolador ESP32, la configuración de la aplicación Blynk y la programación del sistema utilizando Arduino IDE.
Los componentes utilizados en el sistema de detección de caídas de IoT se enumeran en la siguiente tabla de lista de piezas.
| lista de partes | |
| Componentes | Descripción |
| ESP32 (MOD1) | Microcontrolador para programación. |
| MPU6050 (MOD2) | Giroscopio de 6 ejes y acc. sensor |
| Micro USB | |
| Placa de pruebas (para creación de prototipos de circuitos) | |
| Cable de puente de enchufe a enchufe | |
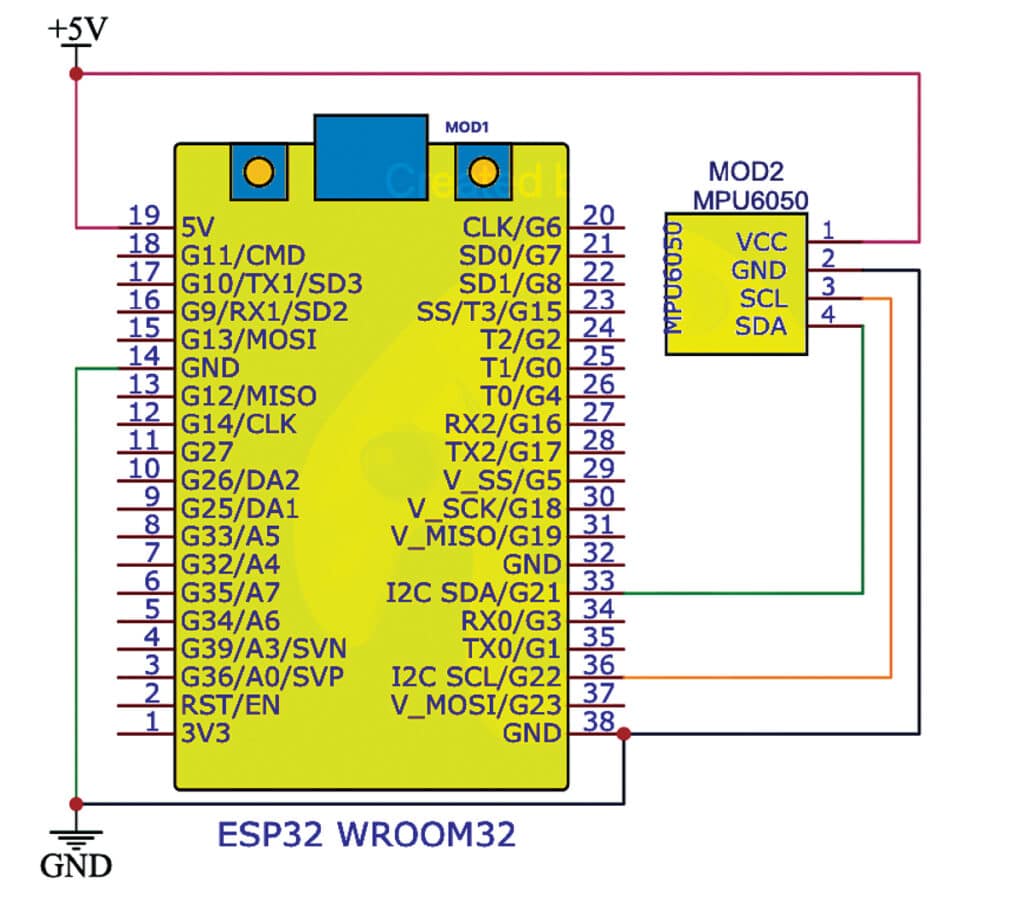
Sistema de detección de caídas – diagrama de cableado
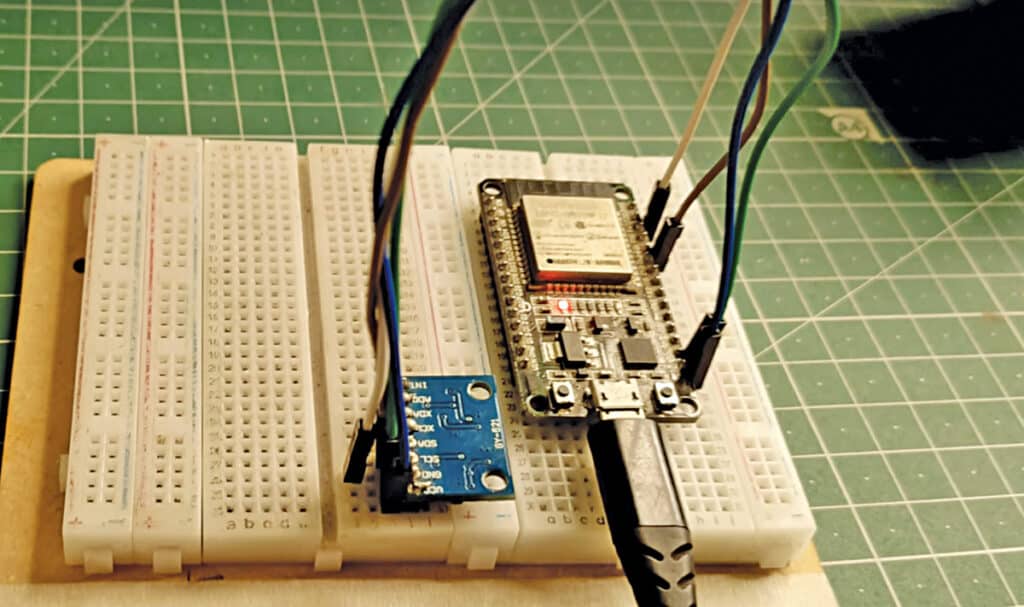
El diagrama de circuito del sistema de detección de caídas IoT con MPU6050, ESP32 y Blynk se muestra en la Fig. 2. Incluye el microcontrolador ESP32 (MOD1), MPU6050 (MOD2), un cable micro USB, una protoboard y algunos jumpers macho a macho.
Antes de codificar, configure la clave API y la cuenta de Blynk.
Primero cree la cuenta de Blynk, luego cree la plantilla del proyecto, obtenga el token de autenticación y regístrelo para usarlo más adelante en el código. Agregue también las bibliotecas necesarias.
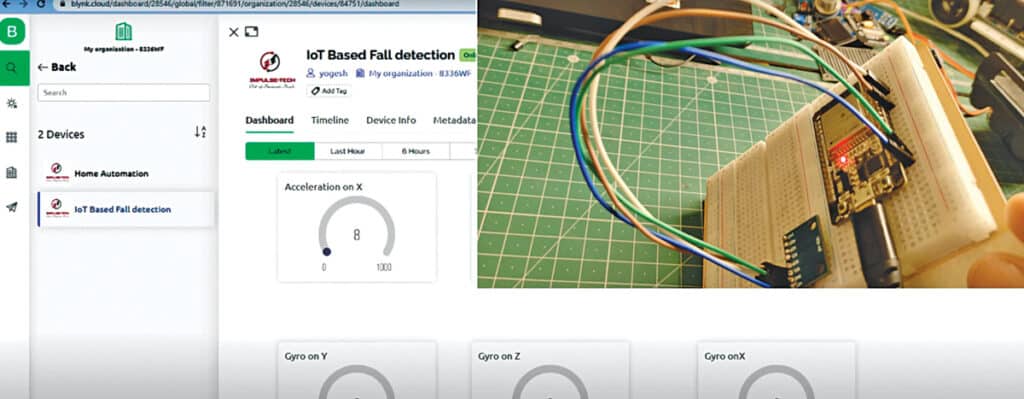
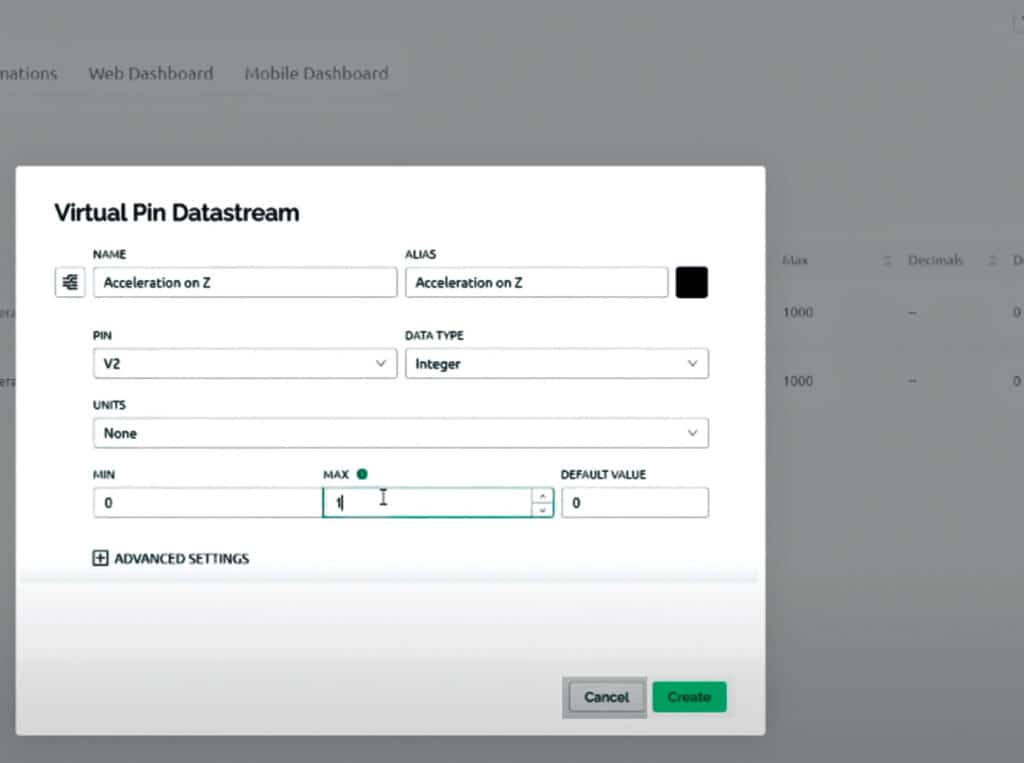
La Figura 3 muestra el panel de Blynk y la Figura 4 muestra cómo se realiza la configuración de Blynk.
Sistema de detección de caídas basado en IoT – Código
Para el código, use las siguientes bibliotecas e instálelas usando el administrador de bibliotecas:
WiFi.h: Gestiona la conectividad Wi-Fi en el ESP32.
Cliente WiFi.h: Se utiliza para crear una conexión de cliente Wi-Fi.
BlynkSimpleEsp32.h: Permite la comunicación con la plataforma Blynk IoT en el ESP32.
Adafruit_MPU6050.h: Proporciona soporte para el sensor MPU6050 y permite leer datos del sensor.
Adafruit_Sensor.h: Contiene tipos de datos de eventos de sensores y funciones auxiliares utilizadas con las bibliotecas de sensores de Adafruit.
Cable.h: Para comunicación I2C, se utiliza para conectar y comunicarse con el sensor MPU6050.
Asegúrese de que estas bibliotecas estén instaladas en su IDE de Arduino o en la plataforma que está utilizando para el desarrollo del proyecto. Para obtener una explicación paso a paso de la codificación, consulte la configuración del fragmento de código del token Blynk y Wi-Fi que se muestra en la Figura 5.
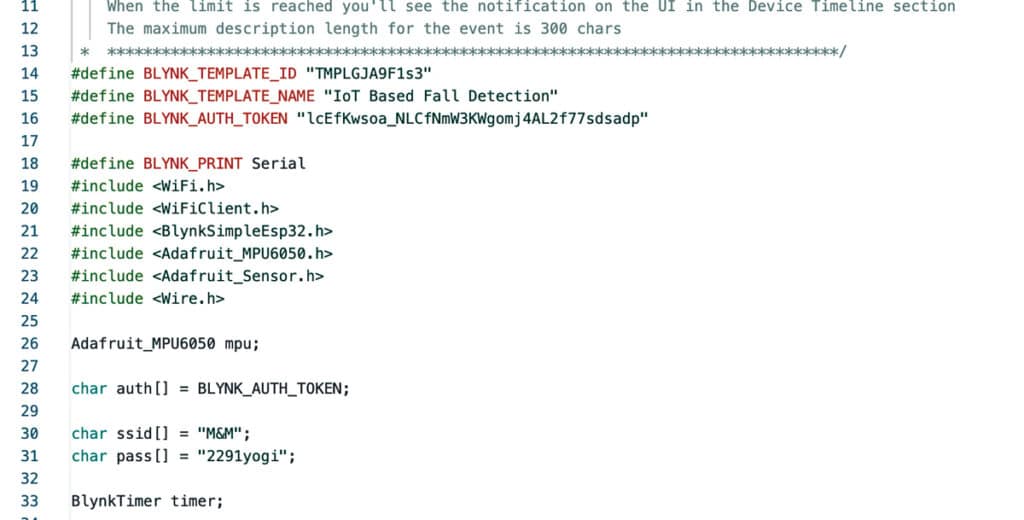
En esta sección, defina el ID, el nombre y el token de autenticación de la plantilla de Blynk de acuerdo con sus credenciales de red Wi-Fi y su token de autenticación. Agregue las bibliotecas necesarias para Wi-Fi, Blynk, el sensor MPU6050, eventos de sensores y la biblioteca de cables para comunicación I2C. La Figura 6 muestra el fragmento de código.
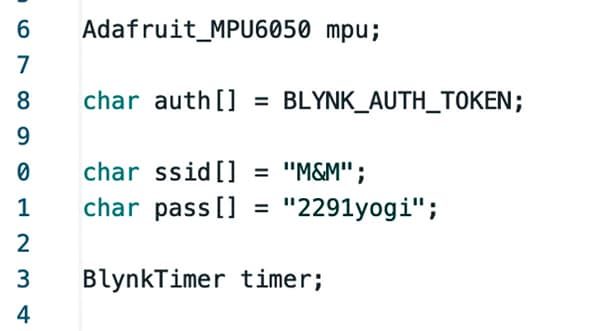
Crear una instancia de Adafruit_MPU6050 Clase para el sensor MPU6050 y definición de variables para autenticación Blynk, SSID de Wi-Fi y contraseña. El BlynkTimer El objeto se utiliza para programar tareas. La Figura 7 muestra el fragmento de código para la recopilación de datos del sensor.
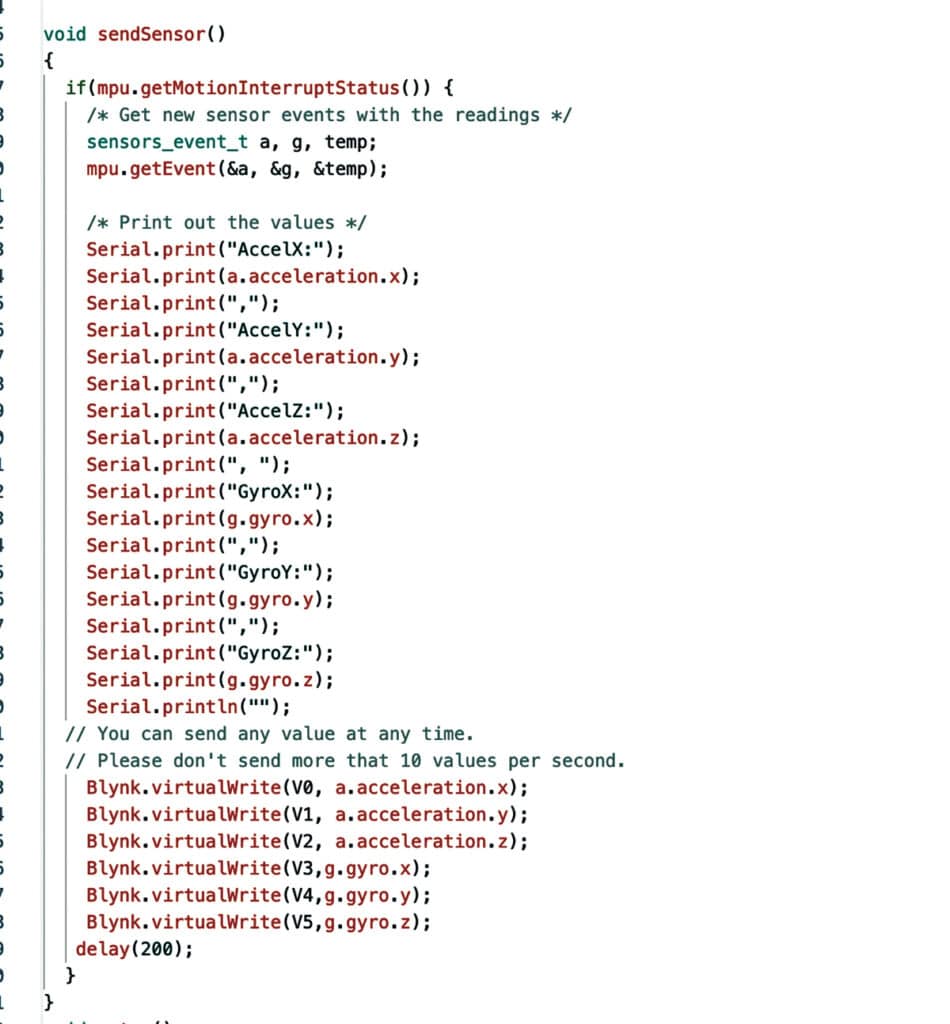
El ‘enviarSensor()’ La función lee datos del sensor MPU6050 y los envía a la aplicación Blynk. Comprueba si se ha producido una interrupción del movimiento, lee los datos del acelerómetro y del giroscopio y envía estos datos a la aplicación Blynk a través de pines virtuales (V0 a V5). Se introduce un retraso para limitar la velocidad de envío de datos. La Figura 8 muestra el fragmento de código para la función de configuración.
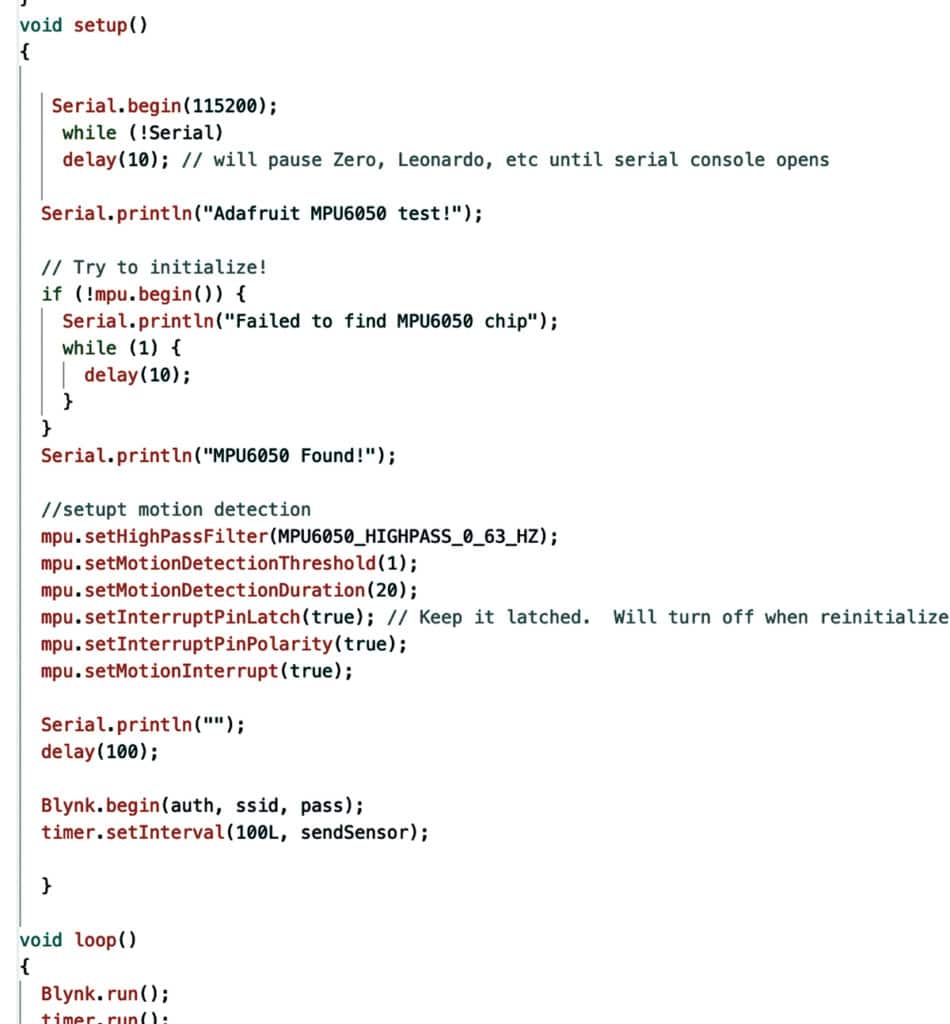
El ‘configuración()’ La función inicializa la comunicación en serie, configura el sensor MPU6050, configura los ajustes de detección de movimiento y se conecta a WiFi y al servidor Blynk utilizando las credenciales de autenticación proporcionadas.
El ‘enviarSensor()’ Está previsto que la función se lleve a cabo periódicamente. En el ‘Cinta()’ Función, ‘Blynk.ejecutar()’ Y ‘temporizador.ejecutar()’ están llamados a manejar la comunicación de Blynk o tareas controladas por tiempo.
Este código está destinado a un sistema de detección de caídas basado en IoT que utiliza un ESP32, un sensor MPU6050 y la plataforma Blynk para monitorear y transmitir datos de movimiento y orientación, lo que lo hace adecuado para aplicaciones de detección de caídas.
Sistema de detección de caídas de bricolaje – Pruebas
Conecte el sensor de acuerdo con el diagrama de circuito que se muestra en la Fig. 2, cargue el código en la placa y encienda el dispositivo con un cable USB o una batería de 5 V.
Espere a que el dispositivo establezca una conexión Wi-Fi.
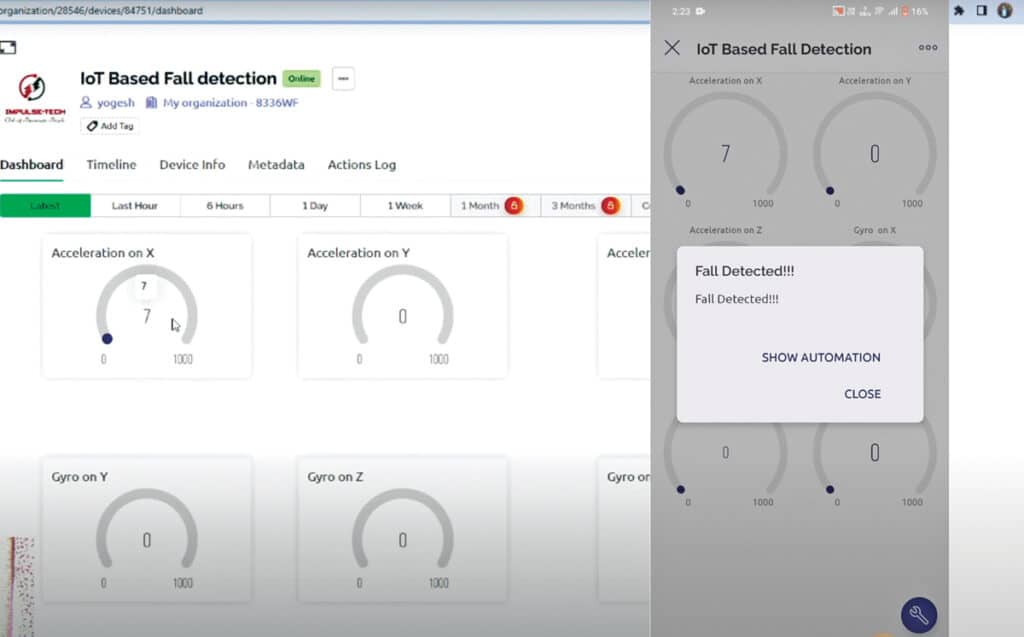
Ahora suelte el dispositivo o cambie rápidamente la aceleración del dispositivo. Lo detecta y lo muestra en el tablero de Blynk y muestra la alerta en el teléfono como se muestra en la Fig. 9.
Yogesh Bawane es profesor de robótica y programación, instructor de Udemy, desarrollador de planes de estudio, YouTuber, entusiasta de la tecnología educativa y creador de contenido de IoT
[ad_2]