")
[ad_1]
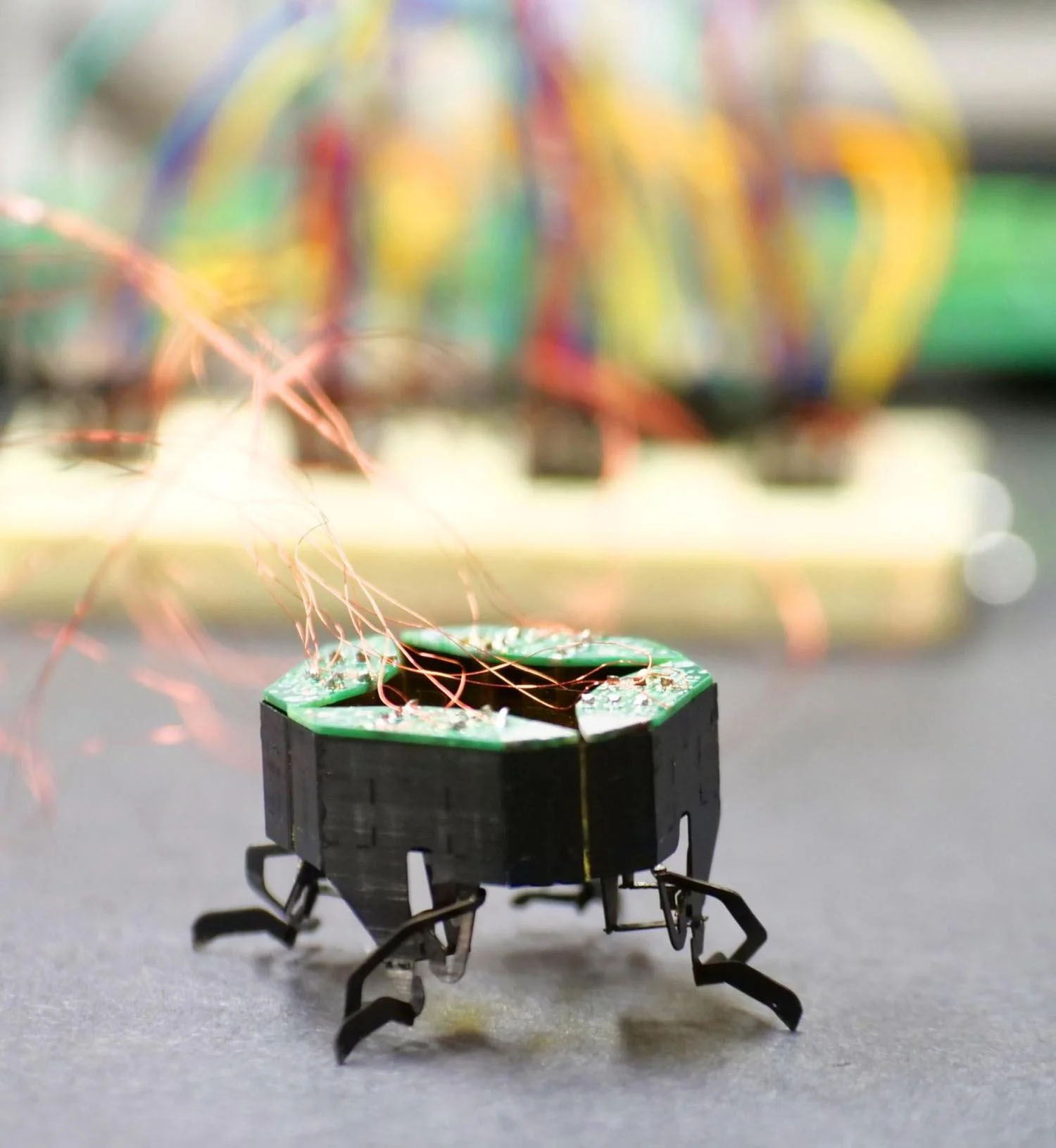
(noticias nanowerk) Métete en un aprieto cerca de ti: CLARI, el pequeño robot aplastable que puede cambiar pasivamente de forma para pasar por espacios reducidos, con un poco de inspiración del mundo de los insectos.
CLARI, que significa Insecto Robótico Articulado con Patas Compliantes, surgió de un equipo de ingenieros de CU Boulder. También tiene el potencial de ayudar a los socorristas de una manera completamente nueva después de grandes desastres.
Varios de estos robots caben fácilmente en la palma de la mano y cada uno pesa menos que una pelota de ping-pong. CLARI puede cambiar su forma de cuadrada a larga y delgada cuando el entorno se vuelve estrecho, dijo Heiko Kabutz, estudiante de posgrado en el Departamento de Ingeniería Mecánica Paul M. Rady.
Kabutz y sus colegas presentaron el robot en miniatura en un estudio publicado en la revista Sistemas inteligentes avanzados («Diseño de CLARI: un robot modular de origami en miniatura con cambio de forma pasivo»).
Actualmente CLARI tiene cuatro patas. Pero el diseño de la máquina permite a los ingenieros mezclar y combinar sus apéndices, lo que podría dar como resultado algunos robots salvajes e inquietos.
«Es modular, lo que significa que es muy fácil de personalizar y agregar más patas», dijo Kabutz. «Algún día queremos construir un robot de ocho patas con forma de araña que pueda caminar sobre una red».
CLARI está todavía en su infancia, añadió Kaushik Jayaram, coautor del estudio y profesor asistente de ingeniería mecánica en CU Boulder. Por ejemplo, el robot está atado a cables que le proporcionan energía y le envían comandos básicos. Pero espera que algún día estas delicadas máquinas puedan arrastrarse por sí solas a lugares donde ningún robot se ha arrastrado antes, como el interior de motores a reacción o los escombros de edificios derrumbados.
«La mayoría de los robots actuales básicamente parecen un cubo», dijo Jayaram. «¿Por qué deberían ser todos iguales? Los animales vienen en todas las formas y tamaños”.
poder de cucaracha
Jayaram no es ajeno a los robots que reflejan la mezcolanza de la vida silvestre.
Como estudiante de posgrado en la Universidad de California, Berkeley, diseñó un robot que podía atravesar espacios reducidos apretándose hasta aproximadamente la mitad de su altura, tal como las cucarachas se abren paso a través de las grietas de una pared. Pero esta máquina, afirmó, es sólo la punta del iceberg en lo que respecta a la flexibilidad animal.
«Pudimos pasar a través de huecos verticales», dijo. «Pero eso me hizo pensar: esa es una forma de comprimir. ¿Cuáles son los demás?
En este punto, CLARI, diseñado para pasar a través de espacios horizontales, se escabulle dentro del marco.
En su forma más simple, el robot tiene forma de cuadrado con una pata en cada uno de sus cuatro lados. Sin embargo, dependiendo de cómo presiones CLARI, puede crecer más ancho, como un cangrejo, o más alargado, como la vieja cucaracha favorita de Jayaram. En general, el robot puede transformarse desde unos 34 milímetros (1,3 pulgadas) de ancho en su forma cuadrada hasta unos 21 milímetros (0,8 pulgadas) de ancho en su forma oblonga.
A diferencia de la cucaracha mecanizada anterior de Jayaram, cada pata de CLARI funciona casi como un robot independiente: con su propia placa de circuito y dos actuadores que mueven la pierna hacia adelante, hacia atrás y hacia los lados, muy parecido a la articulación de la cadera humana. En teoría, esta modularidad podría permitir que los robots CLARI adopten una amplia variedad de formas.
«Lo que queremos son robots de uso general que puedan cambiar de forma y adaptarse a cualquier entorno», afirmó Jayaram. «En el reino animal, podría ser algo así como una ameba, que no tiene una forma bien definida pero puede transformarse dependiendo de si necesita moverse rápidamente o engullir algo de comida».
rastreador web
Él y Kabutz ven su diseño actual como el primero de una serie de robots CLARI que esperan que sean más pequeños y ágiles.
En futuras iteraciones, los investigadores planean integrar sensores en CLARI para que pueda detectar obstáculos y responder a ellos. El grupo también está explorando cómo darle al robot la combinación adecuada de flexibilidad y fuerza, dijo Kabutz, una tarea que se vuelve más difícil cuanto más piernas agrega el equipo.
En última instancia, el equipo quiere crear robots que cambien de forma y que se muevan no sólo a través de un entorno de laboratorio, sino también a través de un espacio natural complejo, donde las máquinas deben rebotar en obstáculos como árboles o incluso briznas de hierba, o penetrar a través de grietas entre rocas y más allá de.
«Si intentamos atrapar un insecto, puede desaparecer en un hueco», dijo Kabutz. «Pero si tenemos robots con las habilidades de una araña o una mosca, podemos agregar cámaras o sensores y ahora podemos comenzar a explorar espacios a los que antes no podíamos entrar».
[ad_2]